PyTorch Lightning Documentation¶
Lightning in 2 steps¶
In this guide we’ll show you how to organize your PyTorch code into Lightning in 2 steps.
Organizing your code with PyTorch Lightning makes your code:
Keep all the flexibility (this is all pure PyTorch), but removes a ton of boilerplate
More readable by decoupling the research code from the engineering
Easier to reproduce
Less error-prone by automating most of the training loop and tricky engineering
Scalable to any hardware without changing your model
Here’s a 3 minute conversion guide for PyTorch projects:
Step 0: Install PyTorch Lightning¶
You can install using pip
pip install pytorch-lightning
Or with conda (see how to install conda here):
conda install pytorch-lightning -c conda-forge
You could also use conda environments
conda activate my_env
pip install pytorch-lightning
Import the following:
import os
import torch
from torch import nn
import torch.nn.functional as F
from torchvision import transforms
from torchvision.datasets import MNIST
from torch.utils.data import DataLoader, random_split
import pytorch_lightning as pl
Step 1: Define LightningModule¶
class LitAutoEncoder(pl.LightningModule):
def __init__(self):
super().__init__()
self.encoder = nn.Sequential(
nn.Linear(28*28, 64),
nn.ReLU(),
nn.Linear(64, 3)
)
self.decoder = nn.Sequential(
nn.Linear(3, 64),
nn.ReLU(),
nn.Linear(64, 28*28)
)
def forward(self, x):
# in lightning, forward defines the prediction/inference actions
embedding = self.encoder(x)
return embedding
def training_step(self, batch, batch_idx):
# training_step defined the train loop.
# It is independent of forward
x, y = batch
x = x.view(x.size(0), -1)
z = self.encoder(x)
x_hat = self.decoder(z)
loss = F.mse_loss(x_hat, x)
# Logging to TensorBoard by default
self.log('train_loss', loss)
return loss
def configure_optimizers(self):
optimizer = torch.optim.Adam(self.parameters(), lr=1e-3)
return optimizer
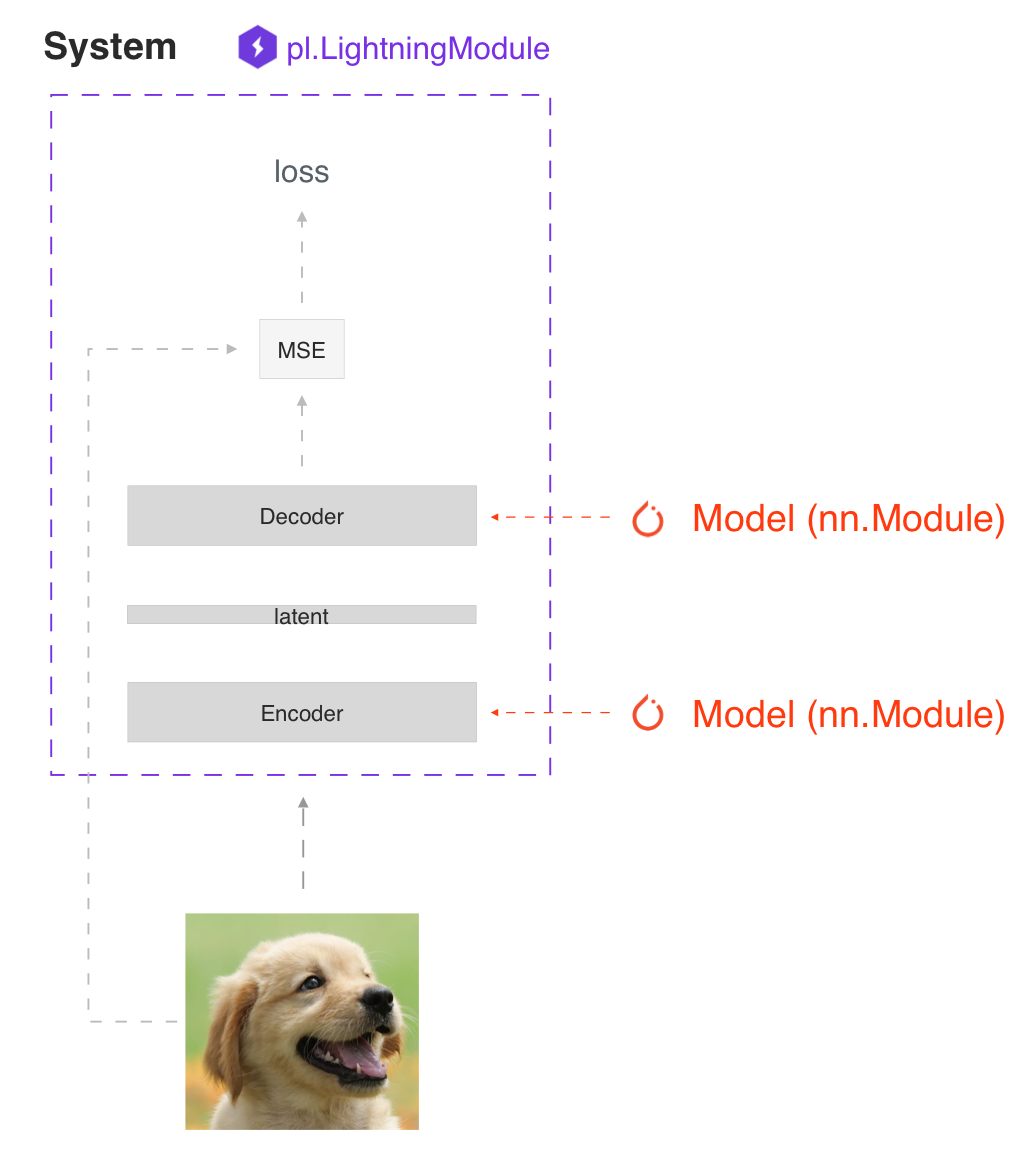
SYSTEM VS MODEL
A LightningModule defines a system not a model.
Examples of systems are:
Seq2seq
Under the hood a LightningModule is still just a torch.nn.Module that groups all research code into a single file to make it self-contained:
The Train loop
The Validation loop
The Test loop
The Model or system of Models
The Optimizer
You can customize any part of training (such as the backward pass) by overriding any of the 20+ hooks found in Available Callback hooks
class LitAutoEncoder(pl.LightningModule):
def backward(self, loss, optimizer, optimizer_idx):
loss.backward()
FORWARD vs TRAINING_STEP
In Lightning we separate training from inference. The training_step defines the full training loop. We encourage users to use the forward to define inference actions.
For example, in this case we could define the autoencoder to act as an embedding extractor:
def forward(self, x):
embeddings = self.encoder(x)
return embeddings
Of course, nothing is stopping you from using forward from within the training_step.
def training_step(self, batch, batch_idx):
...
z = self(x)
It really comes down to your application. We do, however, recommend that you keep both intents separate.
Use forward for inference (predicting).
Use training_step for training.
More details in LightningModule docs.
Step 2: Fit with Lightning Trainer¶
First, define the data however you want. Lightning just needs a DataLoader for the train/val/test splits.
dataset = MNIST(os.getcwd(), download=True, transform=transforms.ToTensor())
train_loader = DataLoader(dataset)
Next, init the LightningModule and the PyTorch Lightning Trainer,
then call fit with both the data and model.
# init model
autoencoder = LitAutoEncoder()
# most basic trainer, uses good defaults (auto-tensorboard, checkpoints, logs, and more)
# trainer = pl.Trainer(gpus=8) (if you have GPUs)
trainer = pl.Trainer()
trainer.fit(autoencoder, train_loader)
The Trainer automates:
Epoch and batch iteration
Calling of optimizer.step(), backward, zero_grad()
Calling of .eval(), enabling/disabling grads
Tensorboard (see Loggers options)
Multi-GPU training support
16-bit training support
Tip
If you prefer to manually manage optimizers you can use the Manual optimization mode (ie: RL, GANs, etc…).
That’s it!
These are the main 2 concepts you need to know in Lightning. All the other features of lightning are either features of the Trainer or LightningModule.
Basic features¶
Manual vs automatic optimization¶
Automatic optimization¶
With Lightning, you don’t need to worry about when to enable/disable grads, do a backward pass, or update optimizers as long as you return a loss with an attached graph from the training_step, Lightning will automate the optimization.
def training_step(self, batch, batch_idx):
loss = self.encoder(batch[0])
return loss
Manual optimization¶
However, for certain research like GANs, reinforcement learning, or something with multiple optimizers or an inner loop, you can turn off automatic optimization and fully control the training loop yourself.
First, turn off automatic optimization:
trainer = Trainer(automatic_optimization=False)
Now you own the train loop!
def training_step(self, batch, batch_idx, optimizer_idx):
# access your optimizers with use_pl_optimizer=False. Default is True
(opt_a, opt_b, opt_c) = self.optimizers(use_pl_optimizer=True)
loss_a = self.generator(batch[0])
# use this instead of loss.backward so we can automate half precision, etc...
self.manual_backward(loss_a, opt_a, retain_graph=True)
self.manual_backward(loss_a, opt_a)
opt_a.step()
opt_a.zero_grad()
loss_b = self.discriminator(batch[0])
self.manual_backward(loss_b, opt_b)
...
Predict or Deploy¶
When you’re done training, you have 3 options to use your LightningModule for predictions.
Option 1: Sub-models¶
Pull out any model inside your system for predictions.
# ----------------------------------
# to use as embedding extractor
# ----------------------------------
autoencoder = LitAutoEncoder.load_from_checkpoint('path/to/checkpoint_file.ckpt')
encoder_model = autoencoder.encoder
encoder_model.eval()
# ----------------------------------
# to use as image generator
# ----------------------------------
decoder_model = autoencoder.decoder
decoder_model.eval()
Option 2: Forward¶
You can also add a forward method to do predictions however you want.
# ----------------------------------
# using the AE to extract embeddings
# ----------------------------------
class LitAutoEncoder(pl.LightningModule):
def forward(self, x):
embedding = self.encoder(x)
return embedding
autoencoder = LitAutoencoder()
autoencoder = autoencoder(torch.rand(1, 28 * 28))
# ----------------------------------
# or using the AE to generate images
# ----------------------------------
class LitAutoEncoder(pl.LightningModule):
def forward(self):
z = torch.rand(1, 3)
image = self.decoder(z)
image = image.view(1, 1, 28, 28)
return image
autoencoder = LitAutoencoder()
image_sample = autoencoder()
Option 3: Production¶
For production systems, onnx or torchscript are much faster. Make sure you have added a forward method or trace only the sub-models you need.
# ----------------------------------
# torchscript
# ----------------------------------
autoencoder = LitAutoEncoder()
torch.jit.save(autoencoder.to_torchscript(), "model.pt")
os.path.isfile("model.pt")
# ----------------------------------
# onnx
# ----------------------------------
with tempfile.NamedTemporaryFile(suffix='.onnx', delete=False) as tmpfile:
autoencoder = LitAutoEncoder()
input_sample = torch.randn((1, 28 * 28))
autoencoder.to_onnx(tmpfile.name, input_sample, export_params=True)
os.path.isfile(tmpfile.name)
Using CPUs/GPUs/TPUs¶
It’s trivial to use CPUs, GPUs or TPUs in Lightning. There’s NO NEED to change your code, simply change the Trainer options.
# train on CPU
trainer = pl.Trainer()
# train on 8 CPUs
trainer = pl.Trainer(num_processes=8)
# train on 1024 CPUs across 128 machines
trainer = pl.Trainer(
num_processes=8,
num_nodes=128
)
# train on 1 GPU
trainer = pl.Trainer(gpus=1)
# train on multiple GPUs across nodes (32 gpus here)
trainer = pl.Trainer(
gpus=4,
num_nodes=8
)
# train on gpu 1, 3, 5 (3 gpus total)
trainer = pl.Trainer(gpus=[1, 3, 5])
# Multi GPU with mixed precision
trainer = pl.Trainer(gpus=2, precision=16)
# Train on TPUs
trainer = pl.Trainer(tpu_cores=8)
Without changing a SINGLE line of your code, you can now do the following with the above code:
# train on TPUs using 16 bit precision
# using only half the training data and checking validation every quarter of a training epoch
trainer = pl.Trainer(
tpu_cores=8,
precision=16,
limit_train_batches=0.5,
val_check_interval=0.25
)
Checkpoints¶
Lightning automatically saves your model. Once you’ve trained, you can load the checkpoints as follows:
model = LitModel.load_from_checkpoint(path)
The above checkpoint contains all the arguments needed to init the model and set the state dict. If you prefer to do it manually, here’s the equivalent
# load the ckpt
ckpt = torch.load('path/to/checkpoint.ckpt')
# equivalent to the above
model = LitModel()
model.load_state_dict(ckpt['state_dict'])
Data flow¶
Each loop (training, validation, test) has three hooks you can implement:
x_step
x_step_end
x_epoch_end
To illustrate how data flows, we’ll use the training loop (ie: x=training)
outs = []
for batch in data:
out = training_step(batch)
outs.append(out)
training_epoch_end(outs)
The equivalent in Lightning is:
def training_step(self, batch, batch_idx):
prediction = ...
return prediction
def training_epoch_end(self, training_step_outputs):
for prediction in predictions:
# do something with these
In the event that you use DP or DDP2 distributed modes (ie: split a batch across GPUs), use the x_step_end to manually aggregate (or don’t implement it to let lightning auto-aggregate for you).
for batch in data:
model_copies = copy_model_per_gpu(model, num_gpus)
batch_split = split_batch_per_gpu(batch, num_gpus)
gpu_outs = []
for model, batch_part in zip(model_copies, batch_split):
# LightningModule hook
gpu_out = model.training_step(batch_part)
gpu_outs.append(gpu_out)
# LightningModule hook
out = training_step_end(gpu_outs)
The lightning equivalent is:
def training_step(self, batch, batch_idx):
loss = ...
return loss
def training_step_end(self, losses):
gpu_0_loss = losses[0]
gpu_1_loss = losses[1]
return (gpu_0_loss + gpu_1_loss) * 1/2
Tip
The validation and test loops have the same structure.
Logging¶
To log to Tensorboard, your favorite logger, and/or the progress bar, use the
log() method which can be called from
any method in the LightningModule.
def training_step(self, batch, batch_idx):
self.log('my_metric', x)
The log() method has a few options:
on_step (logs the metric at that step in training)
on_epoch (automatically accumulates and logs at the end of the epoch)
prog_bar (logs to the progress bar)
logger (logs to the logger like Tensorboard)
Depending on where the log is called from, Lightning auto-determines the correct mode for you. But of course you can override the default behavior by manually setting the flags
Note
Setting on_epoch=True will accumulate your logged values over the full training epoch.
def training_step(self, batch, batch_idx):
self.log('my_loss', loss, on_step=True, on_epoch=True, prog_bar=True, logger=True)
Note
The loss value shown in the progress bar is smoothed (averaged) over the last values, so it differs from the actual loss returned in the train/validation step.
You can also use any method of your logger directly:
def training_step(self, batch, batch_idx):
tensorboard = self.logger.experiment
tensorboard.any_summary_writer_method_you_want())
Once your training starts, you can view the logs by using your favorite logger or booting up the Tensorboard logs:
tensorboard --logdir ./lightning_logs
Note
Lightning automatically shows the loss value returned from training_step in the progress bar.
So, no need to explicitly log like this self.log('loss', loss, prog_bar=True).
Read more about Loggers.
Optional extensions¶
Callbacks¶
A callback is an arbitrary self-contained program that can be executed at arbitrary parts of the training loop.
Here’s an example adding a not-so-fancy learning rate decay rule:
class DecayLearningRate(pl.callbacks.Callback):
def __init__(self):
self.old_lrs = []
def on_train_start(self, trainer, pl_module):
# track the initial learning rates
for opt_idx, optimizer in enumerate(trainer.optimizers):
group = [param_group['lr'] for param_group in optimizer.param_groups]
self.old_lrs.append(group)
def on_train_epoch_end(self, trainer, pl_module, outputs):
for opt_idx, optimizer in enumerate(trainer.optimizers):
old_lr_group = self.old_lrs[opt_idx]
new_lr_group = []
for p_idx, param_group in enumerate(optimizer.param_groups):
old_lr = old_lr_group[p_idx]
new_lr = old_lr * 0.98
new_lr_group.append(new_lr)
param_group['lr'] = new_lr
self.old_lrs[opt_idx] = new_lr_group
And pass the callback to the Trainer
decay_callback = DecayLearningRate()
trainer = Trainer(callbacks=[decay_callback])
Things you can do with a callback:
Send emails at some point in training
Grow the model
Update learning rates
Visualize gradients
…
You are only limited by your imagination
LightningDataModules¶
DataLoaders and data processing code tends to end up scattered around.
Make your data code reusable by organizing it into a LightningDataModule.
class MNISTDataModule(pl.LightningDataModule):
def __init__(self, batch_size=32):
super().__init__()
self.batch_size = batch_size
# When doing distributed training, Datamodules have two optional arguments for
# granular control over download/prepare/splitting data:
# OPTIONAL, called only on 1 GPU/machine
def prepare_data(self):
MNIST(os.getcwd(), train=True, download=True)
MNIST(os.getcwd(), train=False, download=True)
# OPTIONAL, called for every GPU/machine (assigning state is OK)
def setup(self, stage):
# transforms
transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])
# split dataset
if stage == 'fit':
mnist_train = MNIST(os.getcwd(), train=True, transform=transform)
self.mnist_train, self.mnist_val = random_split(mnist_train, [55000, 5000])
if stage == 'test':
self.mnist_test = MNIST(os.getcwd(), train=False, transform=transform)
# return the dataloader for each split
def train_dataloader(self):
mnist_train = DataLoader(self.mnist_train, batch_size=self.batch_size)
return mnist_train
def val_dataloader(self):
mnist_val = DataLoader(self.mnist_val, batch_size=self.batch_size)
return mnist_val
def test_dataloader(self):
mnist_test = DataLoader(self.mnist_test, batch_size=self.batch_size)
return mnist_test
LightningDataModule is designed to enable sharing and reusing data splits
and transforms across different projects. It encapsulates all the steps needed to process data: downloading,
tokenizing, processing etc.
Now you can simply pass your LightningDataModule to
the Trainer:
# init model
model = LitModel()
# init data
dm = MNISTDataModule()
# train
trainer = pl.Trainer()
trainer.fit(model, dm)
# test
trainer.test(datamodule=dm)
DataModules are specifically useful for building models based on data. Read more on LightningDataModule.
Debugging¶
Lightning has many tools for debugging. Here is an example of just a few of them:
# use only 10 train batches and 3 val batches
trainer = pl.Trainer(limit_train_batches=10, limit_val_batches=3)
# Automatically overfit the sane batch of your model for a sanity test
trainer = pl.Trainer(overfit_batches=1)
# unit test all the code- hits every line of your code once to see if you have bugs,
# instead of waiting hours to crash on validation
trainer = pl.Trainer(fast_dev_run=True)
# train only 20% of an epoch
trainer = pl.Trainer(limit_train_batches=0.2)
# run validation every 25% of a training epoch
trainer = pl.Trainer(val_check_interval=0.25)
# Profile your code to find speed/memory bottlenecks
Trainer(profiler=True)
Other coool features¶
Once you define and train your first Lightning model, you might want to try other cool features like
Or read our Step-by-step walk-through to learn more!
Grid AI¶
Grid AI is our native solution for large scale training and tuning on the cloud provider of your choice.

How to organize PyTorch into Lightning¶
To enable your code to work with Lightning, here’s how to organize PyTorch into Lightning
1. Move your computational code¶
Move the model architecture and forward pass to your LightningModule.
class LitModel(LightningModule):
def __init__(self):
super().__init__()
self.layer_1 = torch.nn.Linear(28 * 28, 128)
self.layer_2 = torch.nn.Linear(128, 10)
def forward(self, x):
x = x.view(x.size(0), -1)
x = self.layer_1(x)
x = F.relu(x)
x = self.layer_2(x)
return x
2. Move the optimizer(s) and schedulers¶
Move your optimizers to the configure_optimizers() hook.
class LitModel(LightningModule):
def configure_optimizers(self):
optimizer = torch.optim.Adam(self.parameters(), lr=1e-3)
return optimizer
3. Find the train loop “meat”¶
Lightning automates most of the training for you, the epoch and batch iterations, all you need to keep is the training step logic.
This should go into the training_step() hook (make sure to use the hook parameters, batch and batch_idx in this case):
class LitModel(LightningModule):
def training_step(self, batch, batch_idx):
x, y = batch
y_hat = self(x)
loss = F.cross_entropy(y_hat, y)
return loss
4. Find the val loop “meat”¶
To add an (optional) validation loop add logic to the
validation_step() hook (make sure to use the hook parameters, batch and batch_idx in this case).
class LitModel(LightningModule):
def validation_step(self, batch, batch_idx):
x, y = batch
y_hat = self(x)
val_loss = F.cross_entropy(y_hat, y)
return val_loss
Note
model.eval() and torch.no_grad() are called automatically for validation
5. Find the test loop “meat”¶
To add an (optional) test loop add logic to the
test_step() hook (make sure to use the hook parameters, batch and batch_idx in this case).
class LitModel(LightningModule):
def test_step(self, batch, batch_idx):
x, y = batch
y_hat = self(x)
loss = F.cross_entropy(y_hat, y)
return loss
Note
model.eval() and torch.no_grad() are called automatically for testing.
The test loop will not be used until you call.
trainer.test()
Tip
.test() loads the best checkpoint automatically
6. Remove any .cuda() or to.device() calls¶
Your LightningModule can automatically run on any hardware!
Style guide¶
A main goal of Lightning is to improve readability and reproducibility. Imagine looking into any GitHub repo, finding a lightning module and knowing exactly where to look to find the things you care about.
The goal of this style guide is to encourage Lightning code to be structured similarly.
LightningModule¶
These are best practices about structuring your LightningModule
Systems vs models¶
The main principle behind a LightningModule is that a full system should be self-contained. In Lightning we differentiate between a system and a model.
A model is something like a resnet18, RNN, etc.
A system defines how a collection of models interact with each other. Examples of this are:
GANs
Seq2Seq
BERT
etc
A LightningModule can define both a system and a model.
Here’s a LightningModule that defines a model:
class LitModel(LightningModule):
def __init__(self, num_layers: int = 3):
super().__init__()
self.layer_1 = nn.Linear()
self.layer_2 = nn.Linear()
self.layer_3 = nn.Linear()
Here’s a LightningModule that defines a system:
class LitModel(pl.LightningModule):
def __init__(self, encoder: nn.Module = None, decoder: nn.Module = None)
super().__init__()
self.encoder = encoder
self.decoder = decoder
For fast prototyping it’s often useful to define all the computations in a LightningModule. For reusability and scalability it might be better to pass in the relevant backbones.
Self-contained¶
A Lightning module should be self-contained. A good test to see how self-contained your model is, is to ask yourself this question:
“Can someone drop this file into a Trainer without knowing anything about the internals?”
For example, we couple the optimizer with a model because the majority of models require a specific optimizer with a specific learning rate scheduler to work well.
Init¶
The first place where LightningModules tend to stop being self-contained is in the init. Try to define all the relevant sensible defaults in the init so that the user doesn’t have to guess.
Here’s an example where a user will have to go hunt through files to figure out how to init this LightningModule.
class LitModel(LightningModule):
def __init__(self, params):
self.lr = params.lr
self.coef_x = params.coef_x
Models defined as such leave you with many questions; what is coef_x? is it a string? a float? what is the range? etc…
Instead, be explicit in your init
class LitModel(pl.LightningModule):
def __init__(self, encoder: nn.Module, coef_x: float = 0.2, lr: float = 1e-3):
pass
Now the user doesn’t have to guess. Instead they know the value type and the model has a sensible default where the user can see the value immediately.
Method order¶
The only required methods in the LightningModule are:
init
training_step
configure_optimizers
However, if you decide to implement the rest of the optional methods, the recommended order is:
model/system definition (init)
if doing inference, define forward
training hooks
validation hooks
test hooks
configure_optimizers
any other hooks
In practice, this code looks like:
class LitModel(pl.LightningModule):
def __init__(...):
def forward(...):
def training_step(...)
def training_step_end(...)
def training_epoch_end(...)
def validation_step(...)
def validation_step_end(...)
def validation_epoch_end(...)
def test_step(...)
def test_step_end(...)
def test_epoch_end(...)
def configure_optimizers(...)
def any_extra_hook(...)
Forward vs training_step¶
We recommend using forward for inference/predictions and keeping training_step independent
def forward(...):
embeddings = self.encoder(x)
def training_step(...):
x, y = ...
z = self.encoder(x)
pred = self.decoder(z)
...
However, when using DataParallel, you will need to call forward manually
def training_step(...):
x, y = ...
z = self(x) # < ---------- instead of self.encoder(x)
pred = self.decoder(z)
...
Data¶
These are best practices for handling data.
Dataloaders¶
Lightning uses dataloaders to handle all the data flow through the system. Whenever you structure dataloaders, make sure to tune the number of workers for maximum efficiency.
Warning
Make sure not to use ddp_spawn with num_workers > 0 or you will bottleneck your code.
DataModules¶
Lightning introduced datamodules. The problem with dataloaders is that sharing full datasets is often still challenging because all these questions need to be answered:
What splits were used?
How many samples does this dataset have?
What transforms were used?
etc…
It’s for this reason that we recommend you use datamodules. This is specially important when collaborating because it will save your team a lot of time as well.
All they need to do is drop a datamodule into a lightning trainer and not worry about what was done to the data.
This is true for both academic and corporate settings where data cleaning and ad-hoc instructions slow down the progress of iterating through ideas.
Fast performance tips¶
Lightning builds in all the micro-optimizations we can find to increase your performance. But we can only automate so much.
Here are some additional things you can do to increase your performance.
Dataloaders¶
When building your DataLoader set num_workers > 0 and pin_memory=True (only for GPUs).
Dataloader(dataset, num_workers=8, pin_memory=True)
num_workers¶
The question of how many num_workers is tricky. Here’s a summary of
some references, [1], and our suggestions.
num_workers=0means ONLY the main process will load batches (that can be a bottleneck).num_workers=1means ONLY one worker (just not the main process) will load data but it will still be slow.The
num_workersdepends on the batch size and your machine.A general place to start is to set
num_workersequal to the number of CPUs on that machine.
Warning
Increasing num_workers will ALSO increase your CPU memory consumption.
The best thing to do is to increase the num_workers slowly and stop once you see no more improvement in your training speed.
Spawn¶
When using accelerator=ddp_spawn (the ddp default) or TPU training, the way multiple GPUs/TPU cores are used is by calling .spawn() under the hood.
The problem is that PyTorch has issues with num_workers > 0 when using .spawn(). For this reason we recommend you
use accelerator=ddp so you can increase the num_workers, however your script has to be callable like so:
python my_program.py --gpus X
.item(), .numpy(), .cpu()¶
Don’t call .item() anywhere in your code. Use .detach() instead to remove the connected graph calls. Lightning
takes a great deal of care to be optimized for this.
empty_cache()¶
Don’t call this unnecessarily! Every time you call this ALL your GPUs have to wait to sync.
Construct tensors directly on the device¶
LightningModules know what device they are on! Construct tensors on the device directly to avoid CPU->Device transfer.
# bad
t = torch.rand(2, 2).cuda()
# good (self is LightningModule)
t = torch.rand(2, 2, device=self.device)
For tensors that need to be model attributes, it is best practice to register them as buffers in the modules’s
__init__ method:
# bad
self.t = torch.rand(2, 2, device=self.device)
# good
self.register_buffer("t", torch.rand(2, 2))
Use DDP not DP¶
DP performs three GPU transfers for EVERY batch:
Copy model to device.
Copy data to device.
Copy outputs of each device back to master.
Whereas DDP only performs 1 transfer to sync gradients. Because of this, DDP is MUCH faster than DP.
16-bit precision¶
Use 16-bit to decrease the memory consumption (and thus increase your batch size). On certain GPUs (V100s, 2080tis), 16-bit calculations are also faster. However, know that 16-bit and multi-processing (any DDP) can have issues. Here are some common problems.
- CUDA error: an illegal memory access was encountered.
The solution is likely setting a specific CUDA, CUDNN, PyTorch version combination.
CUDA error: device-side assert triggered. This is a general catch-all error. To see the actual error run your script like so:
# won't see what the error is
python main.py
# will see what the error is
CUDA_LAUNCH_BLOCKING=1 python main.py
Tip
We also recommend using 16-bit native found in PyTorch 1.6. Just install this version and Lightning will automatically use it.
Use Sharded DDP for GPU memory and scaling optimization¶
Sharded DDP is a lightning integration of DeepSpeed ZeRO and ZeRO-2 provided by Fairscale.
When training on multiple GPUs sharded DDP can assist to increase memory efficiency substantially, and in some cases performance on multi-node is better than traditional DDP. This is due to efficient communication and parallelization under the hood.
To use Optimizer Sharded Training, refer to Model Parallelism [BETA].
Sharded DDP can work across all DDP variants by adding the additional --plugins ddp_sharded flag.
Refer to the distributed computing guide for more details.
Sequential Model Parallelism with Checkpointing¶
PyTorch Lightning integration for Sequential Model Parallelism using FairScale. Sequential Model Parallelism splits a sequential module onto multiple GPUs, reducing peak GPU memory requirements substantially.
For more information, refer to Sequential Model Parallelism with Checkpointing.
Benchmark with vanilla PyTorch¶
In this section we set grounds for comparison between vanilla PyTorch and PT Lightning for most common scenarios.
Time comparison¶
We have set regular benchmarking against PyTorch vanilla training loop on with RNN and simple MNIST classifier as per of out CI. In average for simple MNIST CNN classifier we are only about 0.06s slower per epoch, see detail chart bellow.

LightningModule¶
A LightningModule organizes your PyTorch code into 5 sections
Computations (init).
Train loop (training_step)
Validation loop (validation_step)
Test loop (test_step)
Optimizers (configure_optimizers)
Notice a few things.
It’s the SAME code.
The PyTorch code IS NOT abstracted - just organized.
All the other code that’s not in the
LightningModulehas been automated for you by the trainer.
net = Net() trainer = Trainer() trainer.fit(net)
There are no .cuda() or .to() calls… Lightning does these for you.
# don't do in lightning x = torch.Tensor(2, 3) x = x.cuda() x = x.to(device) # do this instead x = x # leave it alone! # or to init a new tensor new_x = torch.Tensor(2, 3) new_x = new_x.type_as(x)
There are no samplers for distributed, Lightning also does this for you.
# Don't do in Lightning... data = MNIST(...) sampler = DistributedSampler(data) DataLoader(data, sampler=sampler) # do this instead data = MNIST(...) DataLoader(data)
A
LightningModuleis atorch.nn.Modulebut with added functionality. Use it as such!
net = Net.load_from_checkpoint(PATH) net.freeze() out = net(x)
Thus, to use Lightning, you just need to organize your code which takes about 30 minutes, (and let’s be real, you probably should do anyhow).
Minimal Example¶
Here are the only required methods.
>>> import pytorch_lightning as pl
>>> class LitModel(pl.LightningModule):
...
... def __init__(self):
... super().__init__()
... self.l1 = torch.nn.Linear(28 * 28, 10)
...
... def forward(self, x):
... return torch.relu(self.l1(x.view(x.size(0), -1)))
...
... def training_step(self, batch, batch_idx):
... x, y = batch
... y_hat = self(x)
... loss = F.cross_entropy(y_hat, y)
... return loss
...
... def configure_optimizers(self):
... return torch.optim.Adam(self.parameters(), lr=0.02)
Which you can train by doing:
train_loader = DataLoader(MNIST(os.getcwd(), download=True, transform=transforms.ToTensor()))
trainer = pl.Trainer()
model = LitModel()
trainer.fit(model, train_loader)
The LightningModule has many convenience methods, but the core ones you need to know about are:
Name |
Description |
|---|---|
init |
Define computations here |
forward |
Use for inference only (separate from training_step) |
training_step |
the full training loop |
validation_step |
the full validation loop |
test_step |
the full test loop |
configure_optimizers |
define optimizers and LR schedulers |
Training¶
Training loop¶
To add a training loop use the training_step method
class LitClassifier(pl.LightningModule):
def __init__(self, model):
super().__init__()
self.model = model
def training_step(self, batch, batch_idx):
x, y = batch
y_hat = self.model(x)
loss = F.cross_entropy(y_hat, y)
return loss
Under the hood, Lightning does the following (pseudocode):
# put model in train mode
model.train()
torch.set_grad_enabled(True)
losses = []
for batch in train_dataloader:
# forward
loss = training_step(batch)
losses.append(loss.detach())
# backward
loss.backward()
# apply and clear grads
optimizer.step()
optimizer.zero_grad()
Training epoch-level metrics¶
If you want to calculate epoch-level metrics and log them, use the .log method
def training_step(self, batch, batch_idx):
x, y = batch
y_hat = self.model(x)
loss = F.cross_entropy(y_hat, y)
# logs metrics for each training_step,
# and the average across the epoch, to the progress bar and logger
self.log('train_loss', loss, on_step=True, on_epoch=True, prog_bar=True, logger=True)
return loss
The .log object automatically reduces the requested metrics across the full epoch. Here’s the pseudocode of what it does under the hood:
outs = []
for batch in train_dataloader:
# forward
out = training_step(val_batch)
# backward
loss.backward()
# apply and clear grads
optimizer.step()
optimizer.zero_grad()
epoch_metric = torch.mean(torch.stack([x['train_loss'] for x in outs]))
Train epoch-level operations¶
If you need to do something with all the outputs of each training_step, override training_epoch_end yourself.
def training_step(self, batch, batch_idx):
x, y = batch
y_hat = self.model(x)
loss = F.cross_entropy(y_hat, y)
preds = ...
return {'loss': loss, 'other_stuff': preds}
def training_epoch_end(self, training_step_outputs):
for pred in training_step_outputs:
# do something
The matching pseudocode is:
outs = []
for batch in train_dataloader:
# forward
out = training_step(val_batch)
# backward
loss.backward()
# apply and clear grads
optimizer.step()
optimizer.zero_grad()
training_epoch_end(outs)
Training with DataParallel¶
When training using a accelerator that splits data from each batch across GPUs, sometimes you might need to aggregate them on the master GPU for processing (dp, or ddp2).
In this case, implement the training_step_end method
def training_step(self, batch, batch_idx):
x, y = batch
y_hat = self.model(x)
loss = F.cross_entropy(y_hat, y)
pred = ...
return {'loss': loss, 'pred': pred}
def training_step_end(self, batch_parts):
gpu_0_prediction = batch_parts[0]['pred']
gpu_1_prediction = batch_parts[1]['pred']
# do something with both outputs
return (batch_parts[0]['loss'] + batch_parts[1]['loss']) / 2
def training_epoch_end(self, training_step_outputs):
for out in training_step_outputs:
# do something with preds
The full pseudocode that lighting does under the hood is:
outs = []
for train_batch in train_dataloader:
batches = split_batch(train_batch)
dp_outs = []
for sub_batch in batches:
# 1
dp_out = training_step(sub_batch)
dp_outs.append(dp_out)
# 2
out = training_step_end(dp_outs)
outs.append(out)
# do something with the outputs for all batches
# 3
training_epoch_end(outs)
Validation loop¶
To add a validation loop, override the validation_step method of the LightningModule:
class LitModel(pl.LightningModule):
def validation_step(self, batch, batch_idx):
x, y = batch
y_hat = self.model(x)
loss = F.cross_entropy(y_hat, y)
self.log('val_loss', loss)
Under the hood, Lightning does the following:
# ...
for batch in train_dataloader:
loss = model.training_step()
loss.backward()
# ...
if validate_at_some_point:
# disable grads + batchnorm + dropout
torch.set_grad_enabled(False)
model.eval()
# ----------------- VAL LOOP ---------------
for val_batch in model.val_dataloader:
val_out = model.validation_step(val_batch)
# ----------------- VAL LOOP ---------------
# enable grads + batchnorm + dropout
torch.set_grad_enabled(True)
model.train()
Validation epoch-level metrics¶
If you need to do something with all the outputs of each validation_step, override validation_epoch_end.
def validation_step(self, batch, batch_idx):
x, y = batch
y_hat = self.model(x)
loss = F.cross_entropy(y_hat, y)
pred = ...
return pred
def validation_epoch_end(self, validation_step_outputs):
for pred in validation_step_outputs:
# do something with a pred
Validating with DataParallel¶
When training using a accelerator that splits data from each batch across GPUs, sometimes you might need to aggregate them on the master GPU for processing (dp, or ddp2).
In this case, implement the validation_step_end method
def validation_step(self, batch, batch_idx):
x, y = batch
y_hat = self.model(x)
loss = F.cross_entropy(y_hat, y)
pred = ...
return {'loss': loss, 'pred': pred}
def validation_step_end(self, batch_parts):
gpu_0_prediction = batch_parts.pred[0]['pred']
gpu_1_prediction = batch_parts.pred[1]['pred']
# do something with both outputs
return (batch_parts[0]['loss'] + batch_parts[1]['loss']) / 2
def validation_epoch_end(self, validation_step_outputs):
for out in validation_step_outputs:
# do something with preds
The full pseudocode that lighting does under the hood is:
outs = []
for batch in dataloader:
batches = split_batch(batch)
dp_outs = []
for sub_batch in batches:
# 1
dp_out = validation_step(sub_batch)
dp_outs.append(dp_out)
# 2
out = validation_step_end(dp_outs)
outs.append(out)
# do something with the outputs for all batches
# 3
validation_epoch_end(outs)
Test loop¶
The process for adding a test loop is the same as the process for adding a validation loop. Please refer to the section above for details.
The only difference is that the test loop is only called when .test() is used:
model = Model()
trainer = Trainer()
trainer.fit()
# automatically loads the best weights for you
trainer.test(model)
There are two ways to call test():
# call after training
trainer = Trainer()
trainer.fit(model)
# automatically auto-loads the best weights
trainer.test(test_dataloaders=test_dataloader)
# or call with pretrained model
model = MyLightningModule.load_from_checkpoint(PATH)
trainer = Trainer()
trainer.test(model, test_dataloaders=test_dataloader)
Inference¶
For research, LightningModules are best structured as systems.
import pytorch_lightning as pl
import torch
from torch import nn
class Autoencoder(pl.LightningModule):
def __init__(self, latent_dim=2):
super().__init__()
self.encoder = nn.Sequential(nn.Linear(28 * 28, 256), nn.ReLU(), nn.Linear(256, latent_dim))
self.decoder = nn.Sequential(nn.Linear(latent_dim, 256), nn.ReLU(), nn.Linear(256, 28 * 28))
def training_step(self, batch, batch_idx):
x, _ = batch
# encode
x = x.view(x.size(0), -1)
z = self.encoder(x)
# decode
recons = self.decoder(z)
# reconstruction
reconstruction_loss = nn.functional.mse_loss(recons, x)
return reconstruction_loss
def validation_step(self, batch, batch_idx):
x, _ = batch
x = x.view(x.size(0), -1)
z = self.encoder(x)
recons = self.decoder(z)
reconstruction_loss = nn.functional.mse_loss(recons, x)
self.log('val_reconstruction', reconstruction_loss)
def configure_optimizers(self):
return torch.optim.Adam(self.parameters(), lr=0.0002)
Which can be trained like this:
autoencoder = Autoencoder()
trainer = pl.Trainer(gpus=1)
trainer.fit(autoencoder, train_dataloader, val_dataloader)
This simple model generates examples that look like this (the encoders and decoders are too weak)
The methods above are part of the lightning interface:
training_step
validation_step
test_step
configure_optimizers
Note that in this case, the train loop and val loop are exactly the same. We can of course reuse this code.
class Autoencoder(pl.LightningModule):
def __init__(self, latent_dim=2):
super().__init__()
self.encoder = nn.Sequential(nn.Linear(28 * 28, 256), nn.ReLU(), nn.Linear(256, latent_dim))
self.decoder = nn.Sequential(nn.Linear(latent_dim, 256), nn.ReLU(), nn.Linear(256, 28 * 28))
def training_step(self, batch, batch_idx):
loss = self.shared_step(batch)
return loss
def validation_step(self, batch, batch_idx):
loss = self.shared_step(batch)
self.log('val_loss', loss)
def shared_step(self, batch):
x, _ = batch
# encode
x = x.view(x.size(0), -1)
z = self.encoder(x)
# decode
recons = self.decoder(z)
# loss
return nn.functional.mse_loss(recons, x)
def configure_optimizers(self):
return torch.optim.Adam(self.parameters(), lr=0.0002)
We create a new method called shared_step that all loops can use. This method name is arbitrary and NOT reserved.
Inference in research¶
In the case where we want to perform inference with the system we can add a forward method to the LightningModule.
class Autoencoder(pl.LightningModule):
def forward(self, x):
return self.decoder(x)
The advantage of adding a forward is that in complex systems, you can do a much more involved inference procedure, such as text generation:
class Seq2Seq(pl.LightningModule):
def forward(self, x):
embeddings = self(x)
hidden_states = self.encoder(embeddings)
for h in hidden_states:
# decode
...
return decoded
Inference in production¶
For cases like production, you might want to iterate different models inside a LightningModule.
import pytorch_lightning as pl
from pytorch_lightning.metrics import functional as FM
class ClassificationTask(pl.LightningModule):
def __init__(self, model):
super().__init__()
self.model = model
def training_step(self, batch, batch_idx):
x, y = batch
y_hat = self.model(x)
loss = F.cross_entropy(y_hat, y)
return loss
def validation_step(self, batch, batch_idx):
x, y = batch
y_hat = self.model(x)
loss = F.cross_entropy(y_hat, y)
acc = FM.accuracy(y_hat, y)
# loss is tensor. The Checkpoint Callback is monitoring 'checkpoint_on'
metrics = {'val_acc': acc, 'val_loss': loss}
self.log_dict(metrics)
return metrics
def test_step(self, batch, batch_idx):
metrics = self.validation_step(batch, batch_idx)
metrics = {'test_acc': metrics['val_acc'], 'test_loss': metrics['val_loss']}
self.log_dict(metrics)
def configure_optimizers(self):
return torch.optim.Adam(self.model.parameters(), lr=0.02)
Then pass in any arbitrary model to be fit with this task
for model in [resnet50(), vgg16(), BidirectionalRNN()]:
task = ClassificationTask(model)
trainer = Trainer(gpus=2)
trainer.fit(task, train_dataloader, val_dataloader)
Tasks can be arbitrarily complex such as implementing GAN training, self-supervised or even RL.
class GANTask(pl.LightningModule):
def __init__(self, generator, discriminator):
super().__init__()
self.generator = generator
self.discriminator = discriminator
...
When used like this, the model can be separated from the Task and thus used in production without needing to keep it in a LightningModule.
You can export to onnx.
Or trace using Jit.
or run in the python runtime.
task = ClassificationTask(model)
trainer = Trainer(gpus=2)
trainer.fit(task, train_dataloader, val_dataloader)
# use model after training or load weights and drop into the production system
model.eval()
y_hat = model(x)
LightningModule API¶
Methods¶
configure_optimizers¶
-
LightningModule.configure_optimizers()[source] Choose what optimizers and learning-rate schedulers to use in your optimization. Normally you’d need one. But in the case of GANs or similar you might have multiple.
- Returns
Any of these 6 options.
Single optimizer.
List or Tuple - List of optimizers.
Two lists - The first list has multiple optimizers, the second a list of LR schedulers (or lr_dict).
Dictionary, with an ‘optimizer’ key, and (optionally) a ‘lr_scheduler’ key whose value is a single LR scheduler or lr_dict.
Tuple of dictionaries as described, with an optional ‘frequency’ key.
None - Fit will run without any optimizer.
Note
The ‘frequency’ value is an int corresponding to the number of sequential batches optimized with the specific optimizer. It should be given to none or to all of the optimizers. There is a difference between passing multiple optimizers in a list, and passing multiple optimizers in dictionaries with a frequency of 1: In the former case, all optimizers will operate on the given batch in each optimization step. In the latter, only one optimizer will operate on the given batch at every step.
The lr_dict is a dictionary which contains the scheduler and its associated configuration. The default configuration is shown below.
{ 'scheduler': lr_scheduler, # The LR scheduler instance (required) 'interval': 'epoch', # The unit of the scheduler's step size 'frequency': 1, # The frequency of the scheduler 'reduce_on_plateau': False, # For ReduceLROnPlateau scheduler 'monitor': 'val_loss', # Metric for ReduceLROnPlateau to monitor 'strict': True, # Whether to crash the training if `monitor` is not found 'name': None, # Custom name for LearningRateMonitor to use }
Only the
schedulerkey is required, the rest will be set to the defaults above.Examples
# most cases def configure_optimizers(self): opt = Adam(self.parameters(), lr=1e-3) return opt # multiple optimizer case (e.g.: GAN) def configure_optimizers(self): generator_opt = Adam(self.model_gen.parameters(), lr=0.01) disriminator_opt = Adam(self.model_disc.parameters(), lr=0.02) return generator_opt, disriminator_opt # example with learning rate schedulers def configure_optimizers(self): generator_opt = Adam(self.model_gen.parameters(), lr=0.01) disriminator_opt = Adam(self.model_disc.parameters(), lr=0.02) discriminator_sched = CosineAnnealing(discriminator_opt, T_max=10) return [generator_opt, disriminator_opt], [discriminator_sched] # example with step-based learning rate schedulers def configure_optimizers(self): gen_opt = Adam(self.model_gen.parameters(), lr=0.01) dis_opt = Adam(self.model_disc.parameters(), lr=0.02) gen_sched = {'scheduler': ExponentialLR(gen_opt, 0.99), 'interval': 'step'} # called after each training step dis_sched = CosineAnnealing(discriminator_opt, T_max=10) # called every epoch return [gen_opt, dis_opt], [gen_sched, dis_sched] # example with optimizer frequencies # see training procedure in `Improved Training of Wasserstein GANs`, Algorithm 1 # https://arxiv.org/abs/1704.00028 def configure_optimizers(self): gen_opt = Adam(self.model_gen.parameters(), lr=0.01) dis_opt = Adam(self.model_disc.parameters(), lr=0.02) n_critic = 5 return ( {'optimizer': dis_opt, 'frequency': n_critic}, {'optimizer': gen_opt, 'frequency': 1} )
Note
Some things to know:
Lightning calls
.backward()and.step()on each optimizer and learning rate scheduler as needed.If you use 16-bit precision (
precision=16), Lightning will automatically handle the optimizers for you.If you use multiple optimizers,
training_step()will have an additionaloptimizer_idxparameter.If you use LBFGS Lightning handles the closure function automatically for you.
If you use multiple optimizers, gradients will be calculated only for the parameters of current optimizer at each training step.
If you need to control how often those optimizers step or override the default
.step()schedule, override theoptimizer_step()hook.If you only want to call a learning rate scheduler every
xstep or epoch, or want to monitor a custom metric, you can specify these in a lr_dict:{ 'scheduler': lr_scheduler, 'interval': 'step', # or 'epoch' 'monitor': 'val_f1', 'frequency': x, }
forward¶
-
LightningModule.forward(*args, **kwargs)[source] Same as
torch.nn.Module.forward(), however in Lightning you want this to define the operations you want to use for prediction (i.e.: on a server or as a feature extractor).Normally you’d call
self()from yourtraining_step()method. This makes it easy to write a complex system for training with the outputs you’d want in a prediction setting.You may also find the
auto_move_data()decorator useful when using the module outside Lightning in a production setting.- Parameters
- Returns
Predicted output
Examples
# example if we were using this model as a feature extractor def forward(self, x): feature_maps = self.convnet(x) return feature_maps def training_step(self, batch, batch_idx): x, y = batch feature_maps = self(x) logits = self.classifier(feature_maps) # ... return loss # splitting it this way allows model to be used a feature extractor model = MyModelAbove() inputs = server.get_request() results = model(inputs) server.write_results(results) # ------------- # This is in stark contrast to torch.nn.Module where normally you would have this: def forward(self, batch): x, y = batch feature_maps = self.convnet(x) logits = self.classifier(feature_maps) return logits
freeze¶
-
LightningModule.freeze()[source] Freeze all params for inference.
Example
model = MyLightningModule(...) model.freeze()
- Return type
None
log¶
-
LightningModule.log(name, value, prog_bar=False, logger=True, on_step=None, on_epoch=None, reduce_fx=torch.mean, tbptt_reduce_fx=torch.mean, tbptt_pad_token=0, enable_graph=False, sync_dist=False, sync_dist_op='mean', sync_dist_group=None)[source] Log a key, value
Example:
self.log('train_loss', loss)
The default behavior per hook is as follows
*also applies to the test loop¶LightningMoule Hook
on_step
on_epoch
prog_bar
logger
training_step
T
F
F
T
training_step_end
T
F
F
T
training_epoch_end
F
T
F
T
validation_step*
F
T
F
T
validation_step_end*
F
T
F
T
validation_epoch_end*
F
T
F
T
- Parameters
on_step¶ (
Optional[bool]) – if True logs at this step. None auto-logs at the training_step but not validation/test_stepon_epoch¶ (
Optional[bool]) – if True logs epoch accumulated metrics. None auto-logs at the val/test step but not training_stepreduce_fx¶ (
Callable) – reduction function over step values for end of epoch. Torch.mean by defaulttbptt_reduce_fx¶ (
Callable) – function to reduce on truncated back propenable_graph¶ (
bool) – if True, will not auto detach the graphsync_dist¶ (
bool) – if True, reduces the metric across GPUs/TPUssync_dist_op¶ (
Union[Any,str]) – the op to sync across GPUs/TPUs
log_dict¶
-
LightningModule.log_dict(dictionary, prog_bar=False, logger=True, on_step=None, on_epoch=None, reduce_fx=torch.mean, tbptt_reduce_fx=torch.mean, tbptt_pad_token=0, enable_graph=False, sync_dist=False, sync_dist_op='mean', sync_dist_group=None)[source] Log a dictonary of values at once
Example:
values = {'loss': loss, 'acc': acc, ..., 'metric_n': metric_n} self.log_dict(values)
- Parameters
on_step¶ (
Optional[bool]) – if True logs at this step. None auto-logs for training_step but not validation/test_stepon_epoch¶ (
Optional[bool]) – if True logs epoch accumulated metrics. None auto-logs for val/test step but not training_stepreduce_fx¶ (
Callable) – reduction function over step values for end of epoch. Torch.mean by defaulttbptt_reduce_fx¶ (
Callable) – function to reduce on truncated back propenable_graph¶ (
bool) – if True, will not auto detach the graphsync_dist¶ (
bool) – if True, reduces the metric across GPUs/TPUssync_dist_op¶ (
Union[Any,str]) – the op to sync across GPUs/TPUs
print¶
-
LightningModule.print(*args, **kwargs)[source] Prints only from process 0. Use this in any distributed mode to log only once.
- Parameters
Example
def forward(self, x): self.print(x, 'in forward')
- Return type
None
save_hyperparameters¶
-
LightningModule.save_hyperparameters(*args, frame=None)[source] Save all model arguments.
- Parameters
args¶ – single object of dict, NameSpace or OmegaConf or string names or arguments from class __init__
>>> from collections import OrderedDict >>> class ManuallyArgsModel(LightningModule): ... def __init__(self, arg1, arg2, arg3): ... super().__init__() ... # manually assign arguments ... self.save_hyperparameters('arg1', 'arg3') ... def forward(self, *args, **kwargs): ... ... >>> model = ManuallyArgsModel(1, 'abc', 3.14) >>> model.hparams "arg1": 1 "arg3": 3.14
>>> class AutomaticArgsModel(LightningModule): ... def __init__(self, arg1, arg2, arg3): ... super().__init__() ... # equivalent automatic ... self.save_hyperparameters() ... def forward(self, *args, **kwargs): ... ... >>> model = AutomaticArgsModel(1, 'abc', 3.14) >>> model.hparams "arg1": 1 "arg2": abc "arg3": 3.14
>>> class SingleArgModel(LightningModule): ... def __init__(self, params): ... super().__init__() ... # manually assign single argument ... self.save_hyperparameters(params) ... def forward(self, *args, **kwargs): ... ... >>> model = SingleArgModel(Namespace(p1=1, p2='abc', p3=3.14)) >>> model.hparams "p1": 1 "p2": abc "p3": 3.14
- Return type
None
test_step¶
-
LightningModule.test_step(*args, **kwargs)[source] Operates on a single batch of data from the test set. In this step you’d normally generate examples or calculate anything of interest such as accuracy.
# the pseudocode for these calls test_outs = [] for test_batch in test_data: out = test_step(test_batch) test_outs.append(out) test_epoch_end(test_outs)
- Parameters
- Returns
Any of.
Any object or value
None- Testing will skip to the next batch
# if you have one test dataloader: def test_step(self, batch, batch_idx) # if you have multiple test dataloaders: def test_step(self, batch, batch_idx, dataloader_idx)
Examples
# CASE 1: A single test dataset def test_step(self, batch, batch_idx): x, y = batch # implement your own out = self(x) loss = self.loss(out, y) # log 6 example images # or generated text... or whatever sample_imgs = x[:6] grid = torchvision.utils.make_grid(sample_imgs) self.logger.experiment.add_image('example_images', grid, 0) # calculate acc labels_hat = torch.argmax(out, dim=1) test_acc = torch.sum(y == labels_hat).item() / (len(y) * 1.0) # log the outputs! self.log_dict({'test_loss': loss, 'test_acc': test_acc})
If you pass in multiple test dataloaders,
test_step()will have an additional argument.# CASE 2: multiple test dataloaders def test_step(self, batch, batch_idx, dataloader_idx): # dataloader_idx tells you which dataset this is.
Note
If you don’t need to test you don’t need to implement this method.
Note
When the
test_step()is called, the model has been put in eval mode and PyTorch gradients have been disabled. At the end of the test epoch, the model goes back to training mode and gradients are enabled.
test_step_end¶
-
LightningModule.test_step_end(*args, **kwargs)[source] Use this when testing with dp or ddp2 because
test_step()will operate on only part of the batch. However, this is still optional and only needed for things like softmax or NCE loss.Note
If you later switch to ddp or some other mode, this will still be called so that you don’t have to change your code.
# pseudocode sub_batches = split_batches_for_dp(batch) batch_parts_outputs = [test_step(sub_batch) for sub_batch in sub_batches] test_step_end(batch_parts_outputs)
- Parameters
batch_parts_outputs¶ – What you return in
test_step()for each batch part.- Returns
None or anything
# WITHOUT test_step_end # if used in DP or DDP2, this batch is 1/num_gpus large def test_step(self, batch, batch_idx): # batch is 1/num_gpus big x, y = batch out = self(x) loss = self.softmax(out) self.log('test_loss', loss) # -------------- # with test_step_end to do softmax over the full batch def test_step(self, batch, batch_idx): # batch is 1/num_gpus big x, y = batch out = self.encoder(x) return out def test_step_end(self, output_results): # this out is now the full size of the batch all_test_step_outs = output_results.out loss = nce_loss(all_test_step_outs) self.log('test_loss', loss)
See also
See the Multi-GPU training guide for more details.
test_epoch_end¶
-
LightningModule.test_epoch_end(outputs)[source] Called at the end of a test epoch with the output of all test steps.
# the pseudocode for these calls test_outs = [] for test_batch in test_data: out = test_step(test_batch) test_outs.append(out) test_epoch_end(test_outs)
- Parameters
outputs¶ (
List[Any]) – List of outputs you defined intest_step_end(), or if there are multiple dataloaders, a list containing a list of outputs for each dataloader- Return type
None- Returns
None
Note
If you didn’t define a
test_step(), this won’t be called.Examples
With a single dataloader:
def test_epoch_end(self, outputs): # do something with the outputs of all test batches all_test_preds = test_step_outputs.predictions some_result = calc_all_results(all_test_preds) self.log(some_result)
With multiple dataloaders, outputs will be a list of lists. The outer list contains one entry per dataloader, while the inner list contains the individual outputs of each test step for that dataloader.
def test_epoch_end(self, outputs): final_value = 0 for dataloader_outputs in outputs: for test_step_out in dataloader_outputs: # do something final_value += test_step_out self.log('final_metric', final_value)
to_onnx¶
-
LightningModule.to_onnx(file_path, input_sample=None, **kwargs)[source] Saves the model in ONNX format
- Parameters
Example
>>> class SimpleModel(LightningModule): ... def __init__(self): ... super().__init__() ... self.l1 = torch.nn.Linear(in_features=64, out_features=4) ... ... def forward(self, x): ... return torch.relu(self.l1(x.view(x.size(0), -1)))
>>> with tempfile.NamedTemporaryFile(suffix='.onnx', delete=False) as tmpfile: ... model = SimpleModel() ... input_sample = torch.randn((1, 64)) ... model.to_onnx(tmpfile.name, input_sample, export_params=True) ... os.path.isfile(tmpfile.name) True
to_torchscript¶
-
LightningModule.to_torchscript(file_path=None, method='script', example_inputs=None, **kwargs)[source] By default compiles the whole model to a
ScriptModule. If you want to use tracing, please provided the argument method=’trace’ and make sure that either the example_inputs argument is provided, or the model has self.example_input_array set. If you would like to customize the modules that are scripted you should override this method. In case you want to return multiple modules, we recommend using a dictionary.- Parameters
file_path¶ (
Union[str,Path,None]) – Path where to save the torchscript. Default: None (no file saved).method¶ (
Optional[str]) – Whether to use TorchScript’s script or trace method. Default: ‘script’example_inputs¶ (
Optional[Any]) – An input to be used to do tracing when method is set to ‘trace’. Default: None (Use self.example_input_array)**kwargs¶ – Additional arguments that will be passed to the
torch.jit.script()ortorch.jit.trace()function.
Note
Example
>>> class SimpleModel(LightningModule): ... def __init__(self): ... super().__init__() ... self.l1 = torch.nn.Linear(in_features=64, out_features=4) ... ... def forward(self, x): ... return torch.relu(self.l1(x.view(x.size(0), -1))) ... >>> model = SimpleModel() >>> torch.jit.save(model.to_torchscript(), "model.pt") >>> os.path.isfile("model.pt") >>> torch.jit.save(model.to_torchscript(file_path="model_trace.pt", method='trace', ... example_inputs=torch.randn(1, 64))) >>> os.path.isfile("model_trace.pt") True
training_step¶
-
LightningModule.training_step(*args, **kwargs)[source] Here you compute and return the training loss and some additional metrics for e.g. the progress bar or logger.
- Parameters
batch¶ (
Tensor| (Tensor, …) | [Tensor, …]) – The output of yourDataLoader. A tensor, tuple or list.optimizer_idx¶ (int) – When using multiple optimizers, this argument will also be present.
hiddens¶ (
Tensor) – Passed in iftruncated_bptt_steps> 0.
- Returns
Any of.
Tensor- The loss tensordict- A dictionary. Can include any keys, but must include the key'loss'None- Training will skip to the next batch
Note
Returning
Noneis currently not supported for multi-GPU or TPU, or with 16-bit precision enabled.In this step you’d normally do the forward pass and calculate the loss for a batch. You can also do fancier things like multiple forward passes or something model specific.
Example:
def training_step(self, batch, batch_idx): x, y, z = batch out = self.encoder(x) loss = self.loss(out, x) return loss
If you define multiple optimizers, this step will be called with an additional
optimizer_idxparameter.# Multiple optimizers (e.g.: GANs) def training_step(self, batch, batch_idx, optimizer_idx): if optimizer_idx == 0: # do training_step with encoder if optimizer_idx == 1: # do training_step with decoder
If you add truncated back propagation through time you will also get an additional argument with the hidden states of the previous step.
# Truncated back-propagation through time def training_step(self, batch, batch_idx, hiddens): # hiddens are the hidden states from the previous truncated backprop step ... out, hiddens = self.lstm(data, hiddens) ... return {'loss': loss, 'hiddens': hiddens}
Note
The loss value shown in the progress bar is smoothed (averaged) over the last values, so it differs from the actual loss returned in train/validation step.
training_step_end¶
-
LightningModule.training_step_end(*args, **kwargs)[source] Use this when training with dp or ddp2 because
training_step()will operate on only part of the batch. However, this is still optional and only needed for things like softmax or NCE loss.Note
If you later switch to ddp or some other mode, this will still be called so that you don’t have to change your code
# pseudocode sub_batches = split_batches_for_dp(batch) batch_parts_outputs = [training_step(sub_batch) for sub_batch in sub_batches] training_step_end(batch_parts_outputs)
- Parameters
batch_parts_outputs¶ – What you return in training_step for each batch part.
- Returns
Anything
When using dp/ddp2 distributed backends, only a portion of the batch is inside the training_step:
def training_step(self, batch, batch_idx): # batch is 1/num_gpus big x, y = batch out = self(x) # softmax uses only a portion of the batch in the denomintaor loss = self.softmax(out) loss = nce_loss(loss) return loss
If you wish to do something with all the parts of the batch, then use this method to do it:
def training_step(self, batch, batch_idx): # batch is 1/num_gpus big x, y = batch out = self.encoder(x) return {'pred': out} def training_step_end(self, training_step_outputs): gpu_0_pred = training_step_outputs[0]['pred'] gpu_1_pred = training_step_outputs[1]['pred'] gpu_n_pred = training_step_outputs[n]['pred'] # this softmax now uses the full batch loss = nce_loss([gpu_0_pred, gpu_1_pred, gpu_n_pred]) return loss
See also
See the Multi-GPU training guide for more details.
training_epoch_end¶
-
LightningModule.training_epoch_end(outputs)[source] Called at the end of the training epoch with the outputs of all training steps. Use this in case you need to do something with all the outputs for every training_step.
# the pseudocode for these calls train_outs = [] for train_batch in train_data: out = training_step(train_batch) train_outs.append(out) training_epoch_end(train_outs)
- Parameters
outputs¶ (
List[Any]) – List of outputs you defined intraining_step(), or if there are multiple dataloaders, a list containing a list of outputs for each dataloader.- Return type
None- Returns
None
Note
If this method is not overridden, this won’t be called.
Example:
def training_epoch_end(self, training_step_outputs): # do something with all training_step outputs return result
With multiple dataloaders,
outputswill be a list of lists. The outer list contains one entry per dataloader, while the inner list contains the individual outputs of each training step for that dataloader.def training_epoch_end(self, training_step_outputs): for out in training_step_outputs: # do something here
unfreeze¶
-
LightningModule.unfreeze()[source] Unfreeze all parameters for training.
model = MyLightningModule(...) model.unfreeze()
- Return type
None
validation_step¶
-
LightningModule.validation_step(*args, **kwargs)[source] Operates on a single batch of data from the validation set. In this step you’d might generate examples or calculate anything of interest like accuracy.
# the pseudocode for these calls val_outs = [] for val_batch in val_data: out = validation_step(val_batch) val_outs.append(out) validation_epoch_end(val_outs)
- Parameters
- Returns
Any of.
Any object or value
None- Validation will skip to the next batch
# pseudocode of order out = validation_step() if defined('validation_step_end'): out = validation_step_end(out) out = validation_epoch_end(out)
# if you have one val dataloader: def validation_step(self, batch, batch_idx) # if you have multiple val dataloaders: def validation_step(self, batch, batch_idx, dataloader_idx)
Examples
# CASE 1: A single validation dataset def validation_step(self, batch, batch_idx): x, y = batch # implement your own out = self(x) loss = self.loss(out, y) # log 6 example images # or generated text... or whatever sample_imgs = x[:6] grid = torchvision.utils.make_grid(sample_imgs) self.logger.experiment.add_image('example_images', grid, 0) # calculate acc labels_hat = torch.argmax(out, dim=1) val_acc = torch.sum(y == labels_hat).item() / (len(y) * 1.0) # log the outputs! self.log_dict({'val_loss': loss, 'val_acc': val_acc})
If you pass in multiple val dataloaders,
validation_step()will have an additional argument.# CASE 2: multiple validation dataloaders def validation_step(self, batch, batch_idx, dataloader_idx): # dataloader_idx tells you which dataset this is.
Note
If you don’t need to validate you don’t need to implement this method.
Note
When the
validation_step()is called, the model has been put in eval mode and PyTorch gradients have been disabled. At the end of validation, the model goes back to training mode and gradients are enabled.
validation_step_end¶
-
LightningModule.validation_step_end(*args, **kwargs)[source] Use this when validating with dp or ddp2 because
validation_step()will operate on only part of the batch. However, this is still optional and only needed for things like softmax or NCE loss.Note
If you later switch to ddp or some other mode, this will still be called so that you don’t have to change your code.
# pseudocode sub_batches = split_batches_for_dp(batch) batch_parts_outputs = [validation_step(sub_batch) for sub_batch in sub_batches] validation_step_end(batch_parts_outputs)
- Parameters
batch_parts_outputs¶ – What you return in
validation_step()for each batch part.- Returns
None or anything
# WITHOUT validation_step_end # if used in DP or DDP2, this batch is 1/num_gpus large def validation_step(self, batch, batch_idx): # batch is 1/num_gpus big x, y = batch out = self.encoder(x) loss = self.softmax(out) loss = nce_loss(loss) self.log('val_loss', loss) # -------------- # with validation_step_end to do softmax over the full batch def validation_step(self, batch, batch_idx): # batch is 1/num_gpus big x, y = batch out = self(x) return out def validation_step_end(self, val_step_outputs): for out in val_step_outputs: # do something with these
See also
See the Multi-GPU training guide for more details.
validation_epoch_end¶
-
LightningModule.validation_epoch_end(outputs)[source] Called at the end of the validation epoch with the outputs of all validation steps.
# the pseudocode for these calls val_outs = [] for val_batch in val_data: out = validation_step(val_batch) val_outs.append(out) validation_epoch_end(val_outs)
- Parameters
outputs¶ (
List[Any]) – List of outputs you defined invalidation_step(), or if there are multiple dataloaders, a list containing a list of outputs for each dataloader.- Return type
None- Returns
None
Note
If you didn’t define a
validation_step(), this won’t be called.Examples
With a single dataloader:
def validation_epoch_end(self, val_step_outputs): for out in val_step_outputs: # do something
With multiple dataloaders, outputs will be a list of lists. The outer list contains one entry per dataloader, while the inner list contains the individual outputs of each validation step for that dataloader.
def validation_epoch_end(self, outputs): for dataloader_output_result in outputs: dataloader_outs = dataloader_output_result.dataloader_i_outputs self.log('final_metric', final_value)
Properties¶
These are properties available in a LightningModule.
device¶
The device the module is on. Use it to keep your code device agnostic
def training_step(...):
z = torch.rand(2, 3, device=self.device)
global_rank¶
The global_rank of this LightningModule. Lightning saves logs, weights etc only from global_rank = 0. You normally do not need to use this property
Global rank refers to the index of that GPU across ALL GPUs. For example, if using 10 machines, each with 4 GPUs, the 4th GPU on the 10th machine has global_rank = 39
global_step¶
The current step (does not reset each epoch)
def training_step(...):
self.logger.experiment.log_image(..., step=self.global_step)
hparams¶
After calling save_hyperparameters anything passed to init() is available via hparams.
def __init__(self, learning_rate):
self.save_hyperparameters()
def configure_optimizers(self):
return Adam(self.parameters(), lr=self.hparams.learning_rate)
logger¶
The current logger being used (tensorboard or other supported logger)
def training_step(...):
# the generic logger (same no matter if tensorboard or other supported logger)
self.logger
# the particular logger
tensorboard_logger = self.logger.experiment
local_rank¶
The local_rank of this LightningModule. Lightning saves logs, weights etc only from global_rank = 0. You normally do not need to use this property
Local rank refers to the rank on that machine. For example, if using 10 machines, the GPU at index 0 on each machine has local_rank = 0.
trainer¶
Pointer to the trainer
def training_step(...):
max_steps = self.trainer.max_steps
any_flag = self.trainer.any_flag
use_amp¶
True if using Automatic Mixed Precision (AMP)
use_ddp¶
True if using ddp
use_ddp2¶
True if using ddp2
use_dp¶
True if using dp
use_tpu¶
True if using TPUs
Hooks¶
This is the pseudocode to describe how all the hooks are called during a call to .fit()
def fit(...):
on_fit_start()
if global_rank == 0:
# prepare data is called on GLOBAL_ZERO only
prepare_data()
for gpu/tpu in gpu/tpus:
train_on_device(model.copy())
on_fit_end()
def train_on_device(model):
# setup is called PER DEVICE
setup()
configure_optimizers()
on_pretrain_routine_start()
for epoch in epochs:
train_loop()
teardown()
def train_loop():
on_train_epoch_start()
train_outs = []
for train_batch in train_dataloader():
on_train_batch_start()
# ----- train_step methods -------
out = training_step(batch)
train_outs.append(out)
loss = out.loss
backward()
on_after_backward()
optimizer_step()
on_before_zero_grad()
optimizer_zero_grad()
on_train_batch_end(out)
if should_check_val:
val_loop()
# end training epoch
logs = training_epoch_end(outs)
def val_loop():
model.eval()
torch.set_grad_enabled(False)
on_validation_epoch_start()
val_outs = []
for val_batch in val_dataloader():
on_validation_batch_start()
# -------- val step methods -------
out = validation_step(val_batch)
val_outs.append(out)
on_validation_batch_end(out)
validation_epoch_end(val_outs)
on_validation_epoch_end()
# set up for train
model.train()
torch.set_grad_enabled(True)
backward¶
-
LightningModule.backward(loss, optimizer, optimizer_idx, *args, **kwargs)[source] Override backward with your own implementation if you need to.
- Parameters
Called to perform backward step. Feel free to override as needed. The loss passed in has already been scaled for accumulated gradients if requested.
Example:
def backward(self, loss, optimizer, optimizer_idx): loss.backward()
- Return type
None
get_progress_bar_dict¶
-
LightningModule.get_progress_bar_dict()[source] Implement this to override the default items displayed in the progress bar. By default it includes the average loss value, split index of BPTT (if used) and the version of the experiment when using a logger.
Epoch 1: 4%|▎ | 40/1095 [00:03<01:37, 10.84it/s, loss=4.501, v_num=10]
Here is an example how to override the defaults:
def get_progress_bar_dict(self): # don't show the version number items = super().get_progress_bar_dict() items.pop("v_num", None) return items
manual_backward¶
-
LightningModule.manual_backward(loss, optimizer, *args, **kwargs)[source] Call this directly from your training_step when doing optimizations manually. By using this we can ensure that all the proper scaling when using 16-bit etc has been done for you
This function forwards all args to the .backward() call as well.
Tip
In manual mode we still automatically clip grads if Trainer(gradient_clip_val=x) is set
Tip
In manual mode we still automatically accumulate grad over batches if Trainer(accumulate_grad_batches=x) is set and you use optimizer.step()
Example:
def training_step(...): (opt_a, opt_b) = self.optimizers() loss = ... # automatically applies scaling, etc... self.manual_backward(loss, opt_a) opt_a.step()
- Return type
None
on_after_backward¶
-
LightningModule.on_after_backward() Called in the training loop after loss.backward() and before optimizers do anything. This is the ideal place to inspect or log gradient information.
Example:
def on_after_backward(self): # example to inspect gradient information in tensorboard if self.trainer.global_step % 25 == 0: # don't make the tf file huge params = self.state_dict() for k, v in params.items(): self.logger.experiment.add_histogram( tag=k, values=v.grad, global_step=self.trainer.global_step )
- Return type
None
on_before_zero_grad¶
-
LightningModule.on_before_zero_grad(optimizer) Called after optimizer.step() and before optimizer.zero_grad().
Called in the training loop after taking an optimizer step and before zeroing grads. Good place to inspect weight information with weights updated.
This is where it is called:
for optimizer in optimizers: optimizer.step() model.on_before_zero_grad(optimizer) # < ---- called here optimizer.zero_grad()
- Parameters
optimizer¶ (
Optimizer) – The optimizer for which grads should be zeroed.- Return type
None
on_fit_start¶
-
ModelHooks.on_fit_start()[source] Called at the very beginning of fit. If on DDP it is called on every process
on_fit_end¶
-
ModelHooks.on_fit_end()[source] Called at the very end of fit. If on DDP it is called on every process
on_load_checkpoint¶
on_save_checkpoint¶
on_pretrain_routine_start¶
-
ModelHooks.on_pretrain_routine_start()[source] Called at the beginning of the pretrain routine (between fit and train start).
fit
pretrain_routine start
pretrain_routine end
training_start
- Return type
None
on_pretrain_routine_end¶
-
ModelHooks.on_pretrain_routine_end()[source] Called at the end of the pretrain routine (between fit and train start).
fit
pretrain_routine start
pretrain_routine end
training_start
- Return type
None
on_test_batch_start¶
-
ModelHooks.on_test_batch_start(batch, batch_idx, dataloader_idx)[source] Called in the test loop before anything happens for that batch.
on_test_batch_end¶
-
ModelHooks.on_test_batch_end(outputs, batch, batch_idx, dataloader_idx)[source] Called in the test loop after the batch.
on_test_epoch_start¶
-
ModelHooks.on_test_epoch_start()[source] Called in the test loop at the very beginning of the epoch.
- Return type
None
on_test_epoch_end¶
-
ModelHooks.on_test_epoch_end()[source] Called in the test loop at the very end of the epoch.
- Return type
None
on_train_batch_start¶
-
ModelHooks.on_train_batch_start(batch, batch_idx, dataloader_idx)[source] Called in the training loop before anything happens for that batch.
If you return -1 here, you will skip training for the rest of the current epoch.
on_train_batch_end¶
-
ModelHooks.on_train_batch_end(outputs, batch, batch_idx, dataloader_idx)[source] Called in the training loop after the batch.
on_train_epoch_start¶
-
ModelHooks.on_train_epoch_start()[source] Called in the training loop at the very beginning of the epoch.
- Return type
None
on_train_epoch_end¶
-
ModelHooks.on_train_epoch_end(outputs)[source] Called in the training loop at the very end of the epoch.
- Return type
None
on_validation_batch_start¶
-
ModelHooks.on_validation_batch_start(batch, batch_idx, dataloader_idx)[source] Called in the validation loop before anything happens for that batch.
on_validation_batch_end¶
-
ModelHooks.on_validation_batch_end(outputs, batch, batch_idx, dataloader_idx)[source] Called in the validation loop after the batch.
on_validation_epoch_start¶
-
ModelHooks.on_validation_epoch_start()[source] Called in the validation loop at the very beginning of the epoch.
- Return type
None
on_validation_epoch_end¶
-
ModelHooks.on_validation_epoch_end()[source] Called in the validation loop at the very end of the epoch.
- Return type
None
optimizer_step¶
-
LightningModule.optimizer_step(epoch=None, batch_idx=None, optimizer=None, optimizer_idx=None, optimizer_closure=None, on_tpu=None, using_native_amp=None, using_lbfgs=None)[source] Override this method to adjust the default way the
Trainercalls each optimizer. By default, Lightning callsstep()andzero_grad()as shown in the example once per optimizer.Tip
With Trainer(enable_pl_optimizer=True), you can user optimizer.step() directly and it will handle zero_grad, accumulated gradients, AMP, TPU and more automatically for you.
Warning
If you are overriding this method, make sure that you pass the
optimizer_closureparameter tooptimizer.step()function as shown in the examples. This ensures thattrain_step_and_backward_closureis called withinrun_training_batch().- Parameters
Examples
# DEFAULT def optimizer_step(self, epoch, batch_idx, optimizer, optimizer_idx, optimizer_closure, on_tpu, using_native_amp, using_lbfgs): optimizer.step(closure=optimizer_closure) # Alternating schedule for optimizer steps (i.e.: GANs) def optimizer_step(self, epoch, batch_idx, optimizer, optimizer_idx, optimizer_closure, on_tpu, using_native_amp, using_lbfgs): # update generator opt every 2 steps if optimizer_idx == 0: if batch_idx % 2 == 0 : optimizer.step(closure=optimizer_closure) optimizer.zero_grad() # update discriminator opt every 4 steps if optimizer_idx == 1: if batch_idx % 4 == 0 : optimizer.step(closure=optimizer_closure) optimizer.zero_grad() # ... # add as many optimizers as you want
Here’s another example showing how to use this for more advanced things such as learning rate warm-up:
# learning rate warm-up def optimizer_step(self, epoch, batch_idx, optimizer, optimizer_idx, optimizer_closure, on_tpu, using_native_amp, using_lbfgs): # warm up lr if self.trainer.global_step < 500: lr_scale = min(1., float(self.trainer.global_step + 1) / 500.) for pg in optimizer.param_groups: pg['lr'] = lr_scale * self.learning_rate # update params optimizer.step(closure=optimizer_closure) optimizer.zero_grad()
- Return type
None
optimizer_zero_grad¶
-
LightningModule.optimizer_zero_grad(epoch, batch_idx, optimizer, optimizer_idx)[source]
prepare_data¶
-
LightningModule.prepare_data() Use this to download and prepare data.
Warning
DO NOT set state to the model (use setup instead) since this is NOT called on every GPU in DDP/TPU
Example:
def prepare_data(self): # good download_data() tokenize() etc() # bad self.split = data_split self.some_state = some_other_state()
In DDP prepare_data can be called in two ways (using Trainer(prepare_data_per_node)):
Once per node. This is the default and is only called on LOCAL_RANK=0.
Once in total. Only called on GLOBAL_RANK=0.
Example:
# DEFAULT # called once per node on LOCAL_RANK=0 of that node Trainer(prepare_data_per_node=True) # call on GLOBAL_RANK=0 (great for shared file systems) Trainer(prepare_data_per_node=False)
This is called before requesting the dataloaders:
model.prepare_data() if ddp/tpu: init() model.setup(stage) model.train_dataloader() model.val_dataloader() model.test_dataloader()
- Return type
None
setup¶
-
ModelHooks.setup(stage)[source] Called at the beginning of fit and test. This is a good hook when you need to build models dynamically or adjust something about them. This hook is called on every process when using DDP.
Example:
class LitModel(...): def __init__(self): self.l1 = None def prepare_data(self): download_data() tokenize() # don't do this self.something = else def setup(stage): data = Load_data(...) self.l1 = nn.Linear(28, data.num_classes)
tbptt_split_batch¶
-
LightningModule.tbptt_split_batch(batch, split_size)[source] When using truncated backpropagation through time, each batch must be split along the time dimension. Lightning handles this by default, but for custom behavior override this function.
- Parameters
- Return type
- Returns
List of batch splits. Each split will be passed to
training_step()to enable truncated back propagation through time. The default implementation splits root level Tensors and Sequences at dim=1 (i.e. time dim). It assumes that each time dim is the same length.
Examples
def tbptt_split_batch(self, batch, split_size): splits = [] for t in range(0, time_dims[0], split_size): batch_split = [] for i, x in enumerate(batch): if isinstance(x, torch.Tensor): split_x = x[:, t:t + split_size] elif isinstance(x, collections.Sequence): split_x = [None] * len(x) for batch_idx in range(len(x)): split_x[batch_idx] = x[batch_idx][t:t + split_size] batch_split.append(split_x) splits.append(batch_split) return splits
Note
Called in the training loop after
on_batch_start()iftruncated_bptt_steps> 0. Each returned batch split is passed separately totraining_step().
teardown¶
train_dataloader¶
-
LightningModule.train_dataloader() Implement a PyTorch DataLoader for training.
- Return type
- Returns
Single PyTorch
DataLoader.
The dataloader you return will not be called every epoch unless you set
reload_dataloaders_every_epochtoTrue.For data processing use the following pattern:
download in
prepare_data()process and split in
setup()
However, the above are only necessary for distributed processing.
Warning
do not assign state in prepare_data
fit()…
prepare_data()setup()train_dataloader()
Note
Lightning adds the correct sampler for distributed and arbitrary hardware. There is no need to set it yourself.
Example
def train_dataloader(self): transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5,), (1.0,))]) dataset = MNIST(root='/path/to/mnist/', train=True, transform=transform, download=True) loader = torch.utils.data.DataLoader( dataset=dataset, batch_size=self.batch_size, shuffle=True ) return loader
val_dataloader¶
-
LightningModule.val_dataloader() Implement one or multiple PyTorch DataLoaders for validation.
The dataloader you return will not be called every epoch unless you set
reload_dataloaders_every_epochtoTrue.It’s recommended that all data downloads and preparation happen in
prepare_data().fit()…
prepare_data()train_dataloader()val_dataloader()test_dataloader()
Note
Lightning adds the correct sampler for distributed and arbitrary hardware There is no need to set it yourself.
- Return type
- Returns
Single or multiple PyTorch DataLoaders.
Examples
def val_dataloader(self): transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5,), (1.0,))]) dataset = MNIST(root='/path/to/mnist/', train=False, transform=transform, download=True) loader = torch.utils.data.DataLoader( dataset=dataset, batch_size=self.batch_size, shuffle=False ) return loader # can also return multiple dataloaders def val_dataloader(self): return [loader_a, loader_b, ..., loader_n]
Note
If you don’t need a validation dataset and a
validation_step(), you don’t need to implement this method.Note
In the case where you return multiple validation dataloaders, the
validation_step()will have an argumentdataloader_idxwhich matches the order here.
test_dataloader¶
-
LightningModule.test_dataloader() Implement one or multiple PyTorch DataLoaders for testing.
The dataloader you return will not be called every epoch unless you set
reload_dataloaders_every_epochtoTrue.For data processing use the following pattern:
download in
prepare_data()process and split in
setup()
However, the above are only necessary for distributed processing.
Warning
do not assign state in prepare_data
fit()…
prepare_data()setup()train_dataloader()val_dataloader()test_dataloader()
Note
Lightning adds the correct sampler for distributed and arbitrary hardware. There is no need to set it yourself.
- Return type
- Returns
Single or multiple PyTorch DataLoaders.
Example
def test_dataloader(self): transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5,), (1.0,))]) dataset = MNIST(root='/path/to/mnist/', train=False, transform=transform, download=True) loader = torch.utils.data.DataLoader( dataset=dataset, batch_size=self.batch_size, shuffle=False ) return loader # can also return multiple dataloaders def test_dataloader(self): return [loader_a, loader_b, ..., loader_n]
Note
If you don’t need a test dataset and a
test_step(), you don’t need to implement this method.Note
In the case where you return multiple test dataloaders, the
test_step()will have an argumentdataloader_idxwhich matches the order here.
transfer_batch_to_device¶
-
DataHooks.transfer_batch_to_device(batch, device=None)[source] Override this hook if your
DataLoaderreturns tensors wrapped in a custom data structure.The data types listed below (and any arbitrary nesting of them) are supported out of the box:
torch.Tensoror anything that implements .to(…)torchtext.data.batch.Batch
For anything else, you need to define how the data is moved to the target device (CPU, GPU, TPU, …).
Example:
def transfer_batch_to_device(self, batch, device) if isinstance(batch, CustomBatch): # move all tensors in your custom data structure to the device batch.samples = batch.samples.to(device) batch.targets = batch.targets.to(device) else: batch = super().transfer_batch_to_device(data, device) return batch
- Parameters
- Return type
- Returns
A reference to the data on the new device.
Note
This hook should only transfer the data and not modify it, nor should it move the data to any other device than the one passed in as argument (unless you know what you are doing).
Note
This hook only runs on single GPU training and DDP. If you need multi-GPU support for your custom batch objects in
dporddp2, you need to define your customDistributedDataParallelorLightningDistributedDataParalleland overrideconfigure_ddp().See also
move_data_to_device()apply_to_collection()
Trainer¶
Once you’ve organized your PyTorch code into a LightningModule, the Trainer automates everything else.
This abstraction achieves the following:
You maintain control over all aspects via PyTorch code without an added abstraction.
The trainer uses best practices embedded by contributors and users from top AI labs such as Facebook AI Research, NYU, MIT, Stanford, etc…
The trainer allows overriding any key part that you don’t want automated.
Basic use¶
This is the basic use of the trainer:
model = MyLightningModule()
trainer = Trainer()
trainer.fit(model, train_dataloader, val_dataloader)
Under the hood¶
Under the hood, the Lightning Trainer handles the training loop details for you, some examples include:
Automatically enabling/disabling grads
Running the training, validation and test dataloaders
Calling the Callbacks at the appropriate times
Putting batches and computations on the correct devices
Here’s the pseudocode for what the trainer does under the hood (showing the train loop only)
# put model in train mode
model.train()
torch.set_grad_enabled(True)
losses = []
for batch in train_dataloader:
# calls hooks like this one
on_train_batch_start()
# train step
loss = training_step(batch)
# backward
loss.backward()
# apply and clear grads
optimizer.step()
optimizer.zero_grad()
losses.append(loss)
Trainer in Python scripts¶
In Python scripts, it’s recommended you use a main function to call the Trainer.
from argparse import ArgumentParser
def main(hparams):
model = LightningModule()
trainer = Trainer(gpus=hparams.gpus)
trainer.fit(model)
if __name__ == '__main__':
parser = ArgumentParser()
parser.add_argument('--gpus', default=None)
args = parser.parse_args()
main(args)
So you can run it like so:
python main.py --gpus 2
Note
Pro-tip: You don’t need to define all flags manually. Lightning can add them automatically
from argparse import ArgumentParser
def main(args):
model = LightningModule()
trainer = Trainer.from_argparse_args(args)
trainer.fit(model)
if __name__ == '__main__':
parser = ArgumentParser()
parser = Trainer.add_argparse_args(parser)
args = parser.parse_args()
main(args)
So you can run it like so:
python main.py --gpus 2 --max_steps 10 --limit_train_batches 10 --any_trainer_arg x
Note
If you want to stop a training run early, you can press “Ctrl + C” on your keyboard.
The trainer will catch the KeyboardInterrupt and attempt a graceful shutdown, including
running callbacks such as on_train_end. The trainer object will also set an attribute
interrupted to True in such cases. If you have a callback which shuts down compute
resources, for example, you can conditionally run the shutdown logic for only uninterrupted runs.
Testing¶
Once you’re done training, feel free to run the test set! (Only right before publishing your paper or pushing to production)
trainer.test(test_dataloaders=test_dataloader)
Deployment / prediction¶
You just trained a LightningModule which is also just a torch.nn.Module. Use it to do whatever!
# load model
pretrained_model = LightningModule.load_from_checkpoint(PATH)
pretrained_model.freeze()
# use it for finetuning
def forward(self, x):
features = pretrained_model(x)
classes = classifier(features)
# or for prediction
out = pretrained_model(x)
api_write({'response': out}
You may wish to run the model on a variety of devices. Instead of moving the data
manually to the correct device, decorate the forward method (or any other method you use for inference)
with auto_move_data() and Lightning will take care of the rest.
Reproducibility¶
To ensure full reproducibility from run to run you need to set seeds for pseudo-random generators,
and set deterministic flag in Trainer.
Example:
from pytorch_lightning import Trainer, seed_everything
seed_everything(42)
# sets seeds for numpy, torch, python.random and PYTHONHASHSEED.
model = Model()
trainer = Trainer(deterministic=True)
Trainer flags¶
accelerator¶
The accelerator backend to use (previously known as distributed_backend).
(
'dp') is DataParallel (split batch among GPUs of same machine)(
'ddp') is DistributedDataParallel (each gpu on each node trains, and syncs grads)(
'ddp_cpu') is DistributedDataParallel on CPU (same as'ddp', but does not use GPUs. Useful for multi-node CPU training or single-node debugging. Note that this will not give a speedup on a single node, since Torch already makes efficient use of multiple CPUs on a single machine.)- (
'ddp2') dp on node, ddp across nodes. Useful for things like increasing the number of negative samples
- (
# default used by the Trainer
trainer = Trainer(accelerator=None)
Example:
# dp = DataParallel
trainer = Trainer(gpus=2, accelerator='dp')
# ddp = DistributedDataParallel
trainer = Trainer(gpus=2, num_nodes=2, accelerator='ddp')
# ddp2 = DistributedDataParallel + dp
trainer = Trainer(gpus=2, num_nodes=2, accelerator='ddp2')
Note
This option does not apply to TPU. TPUs use 'ddp' by default (over each core)
You can also modify hardware behavior by subclassing an existing accelerator to adjust for your needs.
Example:
class MyOwnDDP(DDPAccelerator):
...
Trainer(accelerator=MyOwnDDP())
Warning
Passing in custom accelerators is experimental but work is in progress to enable full compatibility.
accumulate_grad_batches¶
Accumulates grads every k batches or as set up in the dict.
Trainer also calls optimizer.step() for the last indivisible step number.
# default used by the Trainer (no accumulation)
trainer = Trainer(accumulate_grad_batches=1)
Example:
# accumulate every 4 batches (effective batch size is batch*4)
trainer = Trainer(accumulate_grad_batches=4)
# no accumulation for epochs 1-4. accumulate 3 for epochs 5-10. accumulate 20 after that
trainer = Trainer(accumulate_grad_batches={5: 3, 10: 20})
amp_backend¶
Use PyTorch AMP (‘native’) (available PyTorch 1.6+), or NVIDIA apex (‘apex’).
# using PyTorch built-in AMP, default used by the Trainer
trainer = Trainer(amp_backend='native')
# using NVIDIA Apex
trainer = Trainer(amp_backend='apex')
amp_level¶
The optimization level to use (O1, O2, etc…) for 16-bit GPU precision (using NVIDIA apex under the hood).
Check NVIDIA apex docs for level
Example:
# default used by the Trainer
trainer = Trainer(amp_level='O2')
automatic_optimization¶
When set to False, Lightning does not automate the optimization process. This means you are responsible for your own optimizer behavior
Example:
def training_step(self, batch, batch_idx):
# access your optimizers with use_pl_optimizer=False. Default is True
opt = self.optimizers(use_pl_optimizer=True)
loss = ...
self.manual_backward(loss, opt)
opt.step()
opt.zero_grad()
This is not recommended when using a single optimizer, instead it’s recommended when using 2+ optimizers AND you are an expert user. Most useful for research like RL, sparse coding and GAN research.
In the multi-optimizer case, ignore the optimizer_idx flag and use the optimizers directly
Example:
def training_step(self, batch, batch_idx, optimizer_idx):
# access your optimizers with use_pl_optimizer=False. Default is True
(opt_a, opt_b) = self.optimizers(use_pl_optimizer=True)
gen_loss = ...
self.manual_backward(gen_loss, opt_a)
opt_a.step()
opt_a.zero_grad()
disc_loss = ...
self.manual_backward(disc_loss, opt_b)
opt_b.step()
opt_b.zero_grad()
auto_scale_batch_size¶
Automatically tries to find the largest batch size that fits into memory, before any training.
# default used by the Trainer (no scaling of batch size)
trainer = Trainer(auto_scale_batch_size=None)
# run batch size scaling, result overrides hparams.batch_size
trainer = Trainer(auto_scale_batch_size='binsearch')
# call tune to find the batch size
trainer.tune(model)
auto_select_gpus¶
If enabled and gpus is an integer, pick available gpus automatically. This is especially useful when GPUs are configured to be in “exclusive mode”, such that only one process at a time can access them.
Example:
# no auto selection (picks first 2 gpus on system, may fail if other process is occupying)
trainer = Trainer(gpus=2, auto_select_gpus=False)
# enable auto selection (will find two available gpus on system)
trainer = Trainer(gpus=2, auto_select_gpus=True)
# specifies all GPUs regardless of its availability
Trainer(gpus=-1, auto_select_gpus=False)
# specifies all available GPUs (if only one GPU is not occupied, uses one gpu)
Trainer(gpus=-1, auto_select_gpus=True)
auto_lr_find¶
Runs a learning rate finder algorithm (see this paper) when calling trainer.tune(), to find optimal initial learning rate.
# default used by the Trainer (no learning rate finder)
trainer = Trainer(auto_lr_find=False)
Example:
# run learning rate finder, results override hparams.learning_rate
trainer = Trainer(auto_lr_find=True)
# call tune to find the lr
trainer.tune(model)
Example:
# run learning rate finder, results override hparams.my_lr_arg
trainer = Trainer(auto_lr_find='my_lr_arg')
# call tune to find the lr
trainer.tune(model)
Note
See the learning rate finder guide.
benchmark¶
If true enables cudnn.benchmark. This flag is likely to increase the speed of your system if your input sizes don’t change. However, if it does, then it will likely make your system slower.
The speedup comes from allowing the cudnn auto-tuner to find the best algorithm for the hardware [see discussion here].
Example:
# default used by the Trainer
trainer = Trainer(benchmark=False)
deterministic¶
If true enables cudnn.deterministic.
Might make your system slower, but ensures reproducibility.
Also sets $HOROVOD_FUSION_THRESHOLD=0.
For more info check [pytorch docs].
Example:
# default used by the Trainer
trainer = Trainer(deterministic=False)
callbacks¶
Add a list of Callback.
# a list of callbacks
callbacks = [PrintCallback()]
trainer = Trainer(callbacks=callbacks)
Example:
from pytorch_lightning.callbacks import Callback
class PrintCallback(Callback):
def on_train_start(self, trainer, pl_module):
print("Training is started!")
def on_train_end(self, trainer, pl_module):
print("Training is done.")
check_val_every_n_epoch¶
Check val every n train epochs.
Example:
# default used by the Trainer
trainer = Trainer(check_val_every_n_epoch=1)
# run val loop every 10 training epochs
trainer = Trainer(check_val_every_n_epoch=10)
checkpoint_callback¶
By default Lightning saves a checkpoint for you in your current working directory, with the state of your last training epoch, Checkpoints capture the exact value of all parameters used by a model. To disable automatic checkpointing, set this to False.
# default used by Trainer
trainer = Trainer(checkpoint_callback=True)
# turn off automatic checkpointing
trainer = Trainer(checkpoint_callback=False)
You can override the default behavior by initializing the ModelCheckpoint
callback, and adding it to the callbacks list.
See Saving and Loading Weights for how to customize checkpointing.
from pytorch_lightning.callbacks import ModelCheckpoint
# Init ModelCheckpoint callback, monitoring 'val_loss'
checkpoint_callback = ModelCheckpoint(monitor='val_loss')
# Add your callback to the callbacks list
trainer = Trainer(callbacks=[checkpoint_callback])
Warning
Passing a ModelCheckpoint instance to this argument is deprecated since v1.1 and will be unsupported from v1.3. Use callbacks argument instead.
default_root_dir¶
Default path for logs and weights when no logger or
pytorch_lightning.callbacks.ModelCheckpoint callback passed. On
certain clusters you might want to separate where logs and checkpoints are
stored. If you don’t then use this argument for convenience. Paths can be local
paths or remote paths such as s3://bucket/path or ‘hdfs://path/’. Credentials
will need to be set up to use remote filepaths.
# default used by the Trainer
trainer = Trainer(default_root_dir=os.getcwd())
distributed_backend¶
Deprecated: This has been renamed accelerator.
fast_dev_run¶
Runs n if set to n (int) else 1 if set to True batch(es) of train, val and test
to find any bugs (ie: a sort of unit test).
Under the hood the pseudocode looks like this when running fast_dev_run with a single batch:
# loading
__init__()
prepare_data
# test training step
training_batch = next(train_dataloader)
training_step(training_batch)
# test val step
val_batch = next(val_dataloader)
out = validation_step(val_batch)
validation_epoch_end([out])
# default used by the Trainer
trainer = Trainer(fast_dev_run=False)
# runs 1 train, val, test batch and program ends
trainer = Trainer(fast_dev_run=True)
# runs 7 train, val, test batches and program ends
trainer = Trainer(fast_dev_run=7)
Note
This argument is a bit different from limit_train/val/test_batches. Setting this argument will
disable tuner, checkpoint callbacks, early stopping callbacks, loggers and logger callbacks like
LearningRateLogger and runs for only 1 epoch. This must be used only for debugging purposes.
limit_train/val/test_batches only limits the number of batches and won’t disable anything.
flush_logs_every_n_steps¶
Writes logs to disk this often.
# default used by the Trainer
trainer = Trainer(flush_logs_every_n_steps=100)
- See Also:
gpus¶
Number of GPUs to train on (int)
or which GPUs to train on (list)
can handle strings
# default used by the Trainer (ie: train on CPU)
trainer = Trainer(gpus=None)
# equivalent
trainer = Trainer(gpus=0)
Example:
# int: train on 2 gpus
trainer = Trainer(gpus=2)
# list: train on GPUs 1, 4 (by bus ordering)
trainer = Trainer(gpus=[1, 4])
trainer = Trainer(gpus='1, 4') # equivalent
# -1: train on all gpus
trainer = Trainer(gpus=-1)
trainer = Trainer(gpus='-1') # equivalent
# combine with num_nodes to train on multiple GPUs across nodes
# uses 8 gpus in total
trainer = Trainer(gpus=2, num_nodes=4)
# train only on GPUs 1 and 4 across nodes
trainer = Trainer(gpus=[1, 4], num_nodes=4)
- See Also:
gradient_clip_val¶
Gradient clipping value
0 means don’t clip.
# default used by the Trainer
trainer = Trainer(gradient_clip_val=0.0)
limit_train_batches¶
How much of training dataset to check. Useful when debugging or testing something that happens at the end of an epoch.
# default used by the Trainer
trainer = Trainer(limit_train_batches=1.0)
Example:
# default used by the Trainer
trainer = Trainer(limit_train_batches=1.0)
# run through only 25% of the training set each epoch
trainer = Trainer(limit_train_batches=0.25)
# run through only 10 batches of the training set each epoch
trainer = Trainer(limit_train_batches=10)
limit_test_batches¶
How much of test dataset to check.
# default used by the Trainer
trainer = Trainer(limit_test_batches=1.0)
# run through only 25% of the test set each epoch
trainer = Trainer(limit_test_batches=0.25)
# run for only 10 batches
trainer = Trainer(limit_test_batches=10)
In the case of multiple test dataloaders, the limit applies to each dataloader individually.
limit_val_batches¶
How much of validation dataset to check. Useful when debugging or testing something that happens at the end of an epoch.
# default used by the Trainer
trainer = Trainer(limit_val_batches=1.0)
# run through only 25% of the validation set each epoch
trainer = Trainer(limit_val_batches=0.25)
# run for only 10 batches
trainer = Trainer(limit_val_batches=10)
In the case of multiple validation dataloaders, the limit applies to each dataloader individually.
log_every_n_steps¶
How often to add logging rows (does not write to disk)
# default used by the Trainer
trainer = Trainer(log_every_n_steps=50)
- See Also:
log_gpu_memory¶
Options:
None
‘min_max’
‘all’
# default used by the Trainer
trainer = Trainer(log_gpu_memory=None)
# log all the GPUs (on master node only)
trainer = Trainer(log_gpu_memory='all')
# log only the min and max memory on the master node
trainer = Trainer(log_gpu_memory='min_max')
Note
Might slow performance because it uses the output of nvidia-smi.
logger¶
Logger (or iterable collection of loggers) for experiment tracking.
from pytorch_lightning.loggers import TensorBoardLogger
# default logger used by trainer
logger = TensorBoardLogger(
save_dir=os.getcwd(),
version=1,
name='lightning_logs'
)
Trainer(logger=logger)
max_epochs¶
Stop training once this number of epochs is reached
# default used by the Trainer
trainer = Trainer(max_epochs=1000)
min_epochs¶
Force training for at least these many epochs
# default used by the Trainer
trainer = Trainer(min_epochs=1)
max_steps¶
Stop training after this number of steps Training will stop if max_steps or max_epochs have reached (earliest).
# Default (disabled)
trainer = Trainer(max_steps=None)
# Stop after 100 steps
trainer = Trainer(max_steps=100)
min_steps¶
Force training for at least these number of steps. Trainer will train model for at least min_steps or min_epochs (latest).
# Default (disabled)
trainer = Trainer(min_steps=None)
# Run at least for 100 steps (disable min_epochs)
trainer = Trainer(min_steps=100, min_epochs=0)
num_nodes¶
Number of GPU nodes for distributed training.
# default used by the Trainer
trainer = Trainer(num_nodes=1)
# to train on 8 nodes
trainer = Trainer(num_nodes=8)
num_processes¶
Number of processes to train with. Automatically set to the number of GPUs
when using accelerator="ddp". Set to a number greater than 1 when
using accelerator="ddp_cpu" to mimic distributed training on a
machine without GPUs. This is useful for debugging, but will not provide
any speedup, since single-process Torch already makes efficient use of multiple
CPUs.
# Simulate DDP for debugging on your GPU-less laptop
trainer = Trainer(accelerator="ddp_cpu", num_processes=2)
num_sanity_val_steps¶
Sanity check runs n batches of val before starting the training routine. This catches any bugs in your validation without having to wait for the first validation check. The Trainer uses 2 steps by default. Turn it off or modify it here.
# default used by the Trainer
trainer = Trainer(num_sanity_val_steps=2)
# turn it off
trainer = Trainer(num_sanity_val_steps=0)
# check all validation data
trainer = Trainer(num_sanity_val_steps=-1)
This option will reset the validation dataloader unless num_sanity_val_steps=0.
overfit_batches¶
Uses this much data of the training set. If nonzero, will use the same training set for validation and testing. If the training dataloaders have shuffle=True, Lightning will automatically disable it.
Useful for quickly debugging or trying to overfit on purpose.
# default used by the Trainer
trainer = Trainer(overfit_batches=0.0)
# use only 1% of the train set (and use the train set for val and test)
trainer = Trainer(overfit_batches=0.01)
# overfit on 10 of the same batches
trainer = Trainer(overfit_batches=10)
plugins¶
Plugins allow you to connect arbitrary backends, precision libraries, SLURM, etc… For example:
DDP
SLURM
TorchElastic
Apex
To define your own behavior, subclass the relevant class and pass it in. Here’s an example linking up your own cluster.
from pytorch_lightning.cluster_environments import cluster_environment
class MyCluster(ClusterEnvironment):
def master_address(self):
return your_master_address
def master_port(self):
return your_master_port
def world_size(self):
return the_world_size
trainer = Trainer(cluster_environment=cluster_environment())
prepare_data_per_node¶
If True will call prepare_data() on LOCAL_RANK=0 for every node. If False will only call from NODE_RANK=0, LOCAL_RANK=0
# default
Trainer(prepare_data_per_node=True)
# use only NODE_RANK=0, LOCAL_RANK=0
Trainer(prepare_data_per_node=False)
precision¶
Full precision (32), half precision (16). Can be used on CPU, GPU or TPUs.
If used on TPU will use torch.bfloat16 but tensor printing will still show torch.float32.
# default used by the Trainer
trainer = Trainer(precision=32)
# 16-bit precision
trainer = Trainer(precision=16)
Example:
# one day
trainer = Trainer(precision=8|4|2)
process_position¶
Orders the progress bar. Useful when running multiple trainers on the same node.
# default used by the Trainer
trainer = Trainer(process_position=0)
Note
This argument is ignored if a custom callback is passed to callbacks.
profiler¶
To profile individual steps during training and assist in identifying bottlenecks.
See the profiler documentation. for more details.
from pytorch_lightning.profiler import SimpleProfiler, AdvancedProfiler
# default used by the Trainer
trainer = Trainer(profiler=None)
# to profile standard training events, equivalent to `profiler=SimpleProfiler()`
trainer = Trainer(profiler="simple")
# advanced profiler for function-level stats, equivalent to `profiler=AdvancedProfiler()`
trainer = Trainer(profiler="advanced")
progress_bar_refresh_rate¶
How often to refresh progress bar (in steps). In notebooks, faster refresh rates (lower number) is known to crash them because of their screen refresh rates, so raise it to 50 or more.
# default used by the Trainer
trainer = Trainer(progress_bar_refresh_rate=1)
# disable progress bar
trainer = Trainer(progress_bar_refresh_rate=0)
- Note:
This argument is ignored if a custom callback is passed to
callbacks.
reload_dataloaders_every_epoch¶
Set to True to reload dataloaders every epoch.
# if False (default)
train_loader = model.train_dataloader()
for epoch in epochs:
for batch in train_loader:
...
# if True
for epoch in epochs:
train_loader = model.train_dataloader()
for batch in train_loader:
replace_sampler_ddp¶
Enables auto adding of distributed sampler. By default it will add shuffle=True
for train sampler and shuffle=False for val/test sampler. If you want to customize
it, you can set replace_sampler_ddp=False and add your own distributed sampler.
If replace_sampler_ddp=True and a distributed sampler was already added,
Lightning will not replace the existing one.
# default used by the Trainer
trainer = Trainer(replace_sampler_ddp=True)
By setting to False, you have to add your own distributed sampler:
# default used by the Trainer
sampler = torch.utils.data.distributed.DistributedSampler(dataset, shuffle=True)
dataloader = DataLoader(dataset, batch_size=32, sampler=sampler)
resume_from_checkpoint¶
To resume training from a specific checkpoint pass in the path here. If resuming from a mid-epoch checkpoint, training will start from the beginning of the next epoch.
# default used by the Trainer
trainer = Trainer(resume_from_checkpoint=None)
# resume from a specific checkpoint
trainer = Trainer(resume_from_checkpoint='some/path/to/my_checkpoint.ckpt')
sync_batchnorm¶
Enable synchronization between batchnorm layers across all GPUs.
trainer = Trainer(sync_batchnorm=True)
track_grad_norm¶
no tracking (-1)
Otherwise tracks that norm (2 for 2-norm)
# default used by the Trainer
trainer = Trainer(track_grad_norm=-1)
# track the 2-norm
trainer = Trainer(track_grad_norm=2)
tpu_cores¶
How many TPU cores to train on (1 or 8).
Which TPU core to train on [1-8]
A single TPU v2 or v3 has 8 cores. A TPU pod has up to 2048 cores. A slice of a POD means you get as many cores as you request.
Your effective batch size is batch_size * total tpu cores.
Note
No need to add a DistributedSampler,
Lightning automatically does it for you.
This parameter can be either 1 or 8.
Example:
# your_trainer_file.py
# default used by the Trainer (ie: train on CPU)
trainer = Trainer(tpu_cores=None)
# int: train on a single core
trainer = Trainer(tpu_cores=1)
# list: train on a single selected core
trainer = Trainer(tpu_cores=[2])
# int: train on all cores few cores
trainer = Trainer(tpu_cores=8)
# for 8+ cores must submit via xla script with
# a max of 8 cores specified. The XLA script
# will duplicate script onto each TPU in the POD
trainer = Trainer(tpu_cores=8)
To train on more than 8 cores (ie: a POD), submit this script using the xla_dist script.
Example:
python -m torch_xla.distributed.xla_dist
--tpu=$TPU_POD_NAME
--conda-env=torch-xla-nightly
--env=XLA_USE_BF16=1
-- python your_trainer_file.py
truncated_bptt_steps¶
Truncated back prop breaks performs backprop every k steps of a much longer sequence.
If this is enabled, your batches will automatically get truncated and the trainer will apply Truncated Backprop to it.
# default used by the Trainer (ie: disabled)
trainer = Trainer(truncated_bptt_steps=None)
# backprop every 5 steps in a batch
trainer = Trainer(truncated_bptt_steps=5)
Note
Make sure your batches have a sequence dimension.
Lightning takes care to split your batch along the time-dimension.
# we use the second as the time dimension
# (batch, time, ...)
sub_batch = batch[0, 0:t, ...]
Using this feature requires updating your LightningModule’s
pytorch_lightning.core.LightningModule.training_step() to include a hiddens arg
with the hidden
# Truncated back-propagation through time
def training_step(self, batch, batch_idx, hiddens):
# hiddens are the hiddens from the previous truncated backprop step
out, hiddens = self.lstm(data, hiddens)
# remember to detach() hiddens.
# If you don't, you will get a RuntimeError: Trying to backward through
# the graph a second time...
# Using hiddens.detach() allows each split to be disconnected.
return {
"loss": ...,
"hiddens": hiddens # remember to detach() this
}
To modify how the batch is split,
override pytorch_lightning.core.LightningModule.tbptt_split_batch():
class LitMNIST(LightningModule):
def tbptt_split_batch(self, batch, split_size):
# do your own splitting on the batch
return splits
val_check_interval¶
How often within one training epoch to check the validation set. Can specify as float or int.
use (float) to check within a training epoch
use (int) to check every n steps (batches)
# default used by the Trainer
trainer = Trainer(val_check_interval=1.0)
# check validation set 4 times during a training epoch
trainer = Trainer(val_check_interval=0.25)
# check validation set every 1000 training batches
# use this when using iterableDataset and your dataset has no length
# (ie: production cases with streaming data)
trainer = Trainer(val_check_interval=1000)
weights_save_path¶
Directory of where to save weights if specified.
# default used by the Trainer
trainer = Trainer(weights_save_path=os.getcwd())
# save to your custom path
trainer = Trainer(weights_save_path='my/path')
Example:
# if checkpoint callback used, then overrides the weights path
# **NOTE: this saves weights to some/path NOT my/path
checkpoint = ModelCheckpoint(dirpath='some/path')
trainer = Trainer(
callbacks=[checkpoint],
weights_save_path='my/path'
)
weights_summary¶
Prints a summary of the weights when training begins. Options: ‘full’, ‘top’, None.
# default used by the Trainer (ie: print summary of top level modules)
trainer = Trainer(weights_summary='top')
# print full summary of all modules and submodules
trainer = Trainer(weights_summary='full')
# don't print a summary
trainer = Trainer(weights_summary=None)
Trainer class API¶
Methods¶
init¶
-
Trainer.__init__(logger=True, checkpoint_callback=True, callbacks=None, default_root_dir=None, gradient_clip_val=0, process_position=0, num_nodes=1, num_processes=1, gpus=None, auto_select_gpus=False, tpu_cores=None, log_gpu_memory=None, progress_bar_refresh_rate=1, overfit_batches=0.0, track_grad_norm=-1, check_val_every_n_epoch=1, fast_dev_run=False, accumulate_grad_batches=1, max_epochs=1000, min_epochs=1, max_steps=None, min_steps=None, limit_train_batches=1.0, limit_val_batches=1.0, limit_test_batches=1.0, val_check_interval=1.0, flush_logs_every_n_steps=100, log_every_n_steps=50, accelerator=None, sync_batchnorm=False, precision=32, weights_summary='top', weights_save_path=None, num_sanity_val_steps=2, truncated_bptt_steps=None, resume_from_checkpoint=None, profiler=None, benchmark=False, deterministic=False, reload_dataloaders_every_epoch=False, auto_lr_find=False, replace_sampler_ddp=True, terminate_on_nan=False, auto_scale_batch_size=False, prepare_data_per_node=True, plugins=None, amp_backend='native', amp_level='O2', distributed_backend=None, automatic_optimization=None, move_metrics_to_cpu=False, enable_pl_optimizer=None)[source] Customize every aspect of training via flags
- Parameters
accelerator¶ (
Union[str,Accelerator,None]) – Previously known as distributed_backend (dp, ddp, ddp2, etc…). Can also take in an accelerator object for custom hardware.accumulate_grad_batches¶ (
Union[int,Dict[int,int],List[list]]) – Accumulates grads every k batches or as set up in the dict.amp_backend¶ (
str) – The mixed precision backend to use (“native” or “apex”)amp_level¶ (
str) – The optimization level to use (O1, O2, etc…).auto_lr_find¶ (
Union[bool,str]) – If set to True, will make trainer.tune() run a learning rate finder, trying to optimize initial learning for faster convergence. trainer.tune() method will set the suggested learning rate in self.lr or self.learning_rate in the LightningModule. To use a different key set a string instead of True with the key name.auto_scale_batch_size¶ (
Union[str,bool]) – If set to True, will initially run a batch size finder trying to find the largest batch size that fits into memory. The result will be stored in self.batch_size in the LightningModule. Additionally, can be set to either power that estimates the batch size through a power search or binsearch that estimates the batch size through a binary search.auto_select_gpus¶ (
bool) – If enabled and gpus is an integer, pick available gpus automatically. This is especially useful when GPUs are configured to be in “exclusive mode”, such that only one process at a time can access them.callbacks¶ (
Optional[List[Callback]]) – Add a list of callbacks.If
True, enable checkpointing. It will configure a default ModelCheckpoint callback if there is no user-defined ModelCheckpoint incallbacks. Default:True.Warning
Passing a ModelCheckpoint instance to this argument is deprecated since v1.1 and will be unsupported from v1.3. Use callbacks argument instead.
check_val_every_n_epoch¶ (
int) – Check val every n train epochs.default_root_dir¶ (
Optional[str]) – Default path for logs and weights when no logger/ckpt_callback passed. Default:os.getcwd(). Can be remote file paths such as s3://mybucket/path or ‘hdfs://path/’deterministic¶ (
bool) – If true enables cudnn.deterministic.distributed_backend¶ (
Optional[str]) – deprecated. Please use ‘accelerator’fast_dev_run¶ (
Union[int,bool]) – runs n if set ton(int) else 1 if set toTruebatch(es) of train, val and test to find any bugs (ie: a sort of unit test).flush_logs_every_n_steps¶ (
int) – How often to flush logs to disk (defaults to every 100 steps).gpus¶ (
Union[int,str,List[int],None]) – number of gpus to train on (int) or which GPUs to train on (list or str) applied per nodelimit_train_batches¶ (
Union[int,float]) – How much of training dataset to check (floats = percent, int = num_batches)limit_val_batches¶ (
Union[int,float]) – How much of validation dataset to check (floats = percent, int = num_batches)limit_test_batches¶ (
Union[int,float]) – How much of test dataset to check (floats = percent, int = num_batches)logger¶ (
Union[LightningLoggerBase,Iterable[LightningLoggerBase],bool]) – Logger (or iterable collection of loggers) for experiment tracking.log_gpu_memory¶ (
Optional[str]) – None, ‘min_max’, ‘all’. Might slow performancelog_every_n_steps¶ (
int) – How often to log within steps (defaults to every 50 steps).automatic_optimization¶ (
Optional[bool]) – If False you are responsible for calling .backward, .step, zero_grad in LightningModule. This argument has been moved to LightningModule. It is deprecated here in v1.1 and will be removed in v1.3.prepare_data_per_node¶ (
bool) – If True, each LOCAL_RANK=0 will call prepare data. Otherwise only NODE_RANK=0, LOCAL_RANK=0 will prepare dataprocess_position¶ (
int) – orders the progress bar when running multiple models on same machine.progress_bar_refresh_rate¶ (
int) – How often to refresh progress bar (in steps). Value0disables progress bar. Ignored when a custom callback is passed tocallbacks.profiler¶ (
Union[BaseProfiler,bool,str,None]) – To profile individual steps during training and assist in identifying bottlenecks. Passing bool value is deprecated in v1.1 and will be removed in v1.3.overfit_batches¶ (
Union[int,float]) – Overfit a percent of training data (float) or a set number of batches (int). Default: 0.0plugins¶ (
Union[str,list,None]) – Plugins allow modification of core behavior like ddp and amp, and enable custom lightning plugins.precision¶ (
int) – Full precision (32), half precision (16). Can be used on CPU, GPU or TPUs.max_epochs¶ (
int) – Stop training once this number of epochs is reached.min_epochs¶ (
int) – Force training for at least these many epochsmax_steps¶ (
Optional[int]) – Stop training after this number of steps. Disabled by default (None).min_steps¶ (
Optional[int]) – Force training for at least these number of steps. Disabled by default (None).num_nodes¶ (
int) – number of GPU nodes for distributed training.num_processes¶ (
int) – number of processes for distributed training with distributed_backend=”ddp_cpu”num_sanity_val_steps¶ (
int) – Sanity check runs n validation batches before starting the training routine. Set it to -1 to run all batches in all validation dataloaders. Default: 2reload_dataloaders_every_epoch¶ (
bool) – Set to True to reload dataloaders every epoch.replace_sampler_ddp¶ (
bool) – Explicitly enables or disables sampler replacement. If not specified this will toggled automatically when DDP is used. By default it will addshuffle=Truefor train sampler andshuffle=Falsefor val/test sampler. If you want to customize it, you can setreplace_sampler_ddp=Falseand add your own distributed sampler.resume_from_checkpoint¶ (
Union[str,Path,None]) – Path/URL of the checkpoint from which training is resumed. If there is no checkpoint file at the path, start from scratch. If resuming from mid-epoch checkpoint, training will start from the beginning of the next epoch.sync_batchnorm¶ (
bool) – Synchronize batch norm layers between process groups/whole world.terminate_on_nan¶ (
bool) – If set to True, will terminate training (by raising a ValueError) at the end of each training batch, if any of the parameters or the loss are NaN or +/-inf.tpu_cores¶ (
Union[int,str,List[int],None]) – How many TPU cores to train on (1 or 8) / Single TPU to train on [1]track_grad_norm¶ (
Union[int,float,str]) – -1 no tracking. Otherwise tracks that p-norm. May be set to ‘inf’ infinity-norm.truncated_bptt_steps¶ (
Optional[int]) – Truncated back prop breaks performs backprop every k steps of much longer sequence.val_check_interval¶ (
Union[int,float]) – How often to check the validation set. Use float to check within a training epoch, use int to check every n steps (batches).weights_summary¶ (
Optional[str]) – Prints a summary of the weights when training begins.weights_save_path¶ (
Optional[str]) – Where to save weights if specified. Will override default_root_dir for checkpoints only. Use this if for whatever reason you need the checkpoints stored in a different place than the logs written in default_root_dir. Can be remote file paths such as s3://mybucket/path or ‘hdfs://path/’ Defaults to default_root_dir.move_metrics_to_cpu¶ (
bool) – Whether to force internal logged metrics to be moved to cpu. This can save some gpu memory, but can make training slower. Use with attention.enable_pl_optimizer¶ (
Optional[bool]) – If True, each optimizer will be wrapped by pytorch_lightning.core.optimizer.LightningOptimizer. It allows Lightning to handle AMP, TPU, accumulated_gradients, etc. .. warning:: Currently deprecated and it will be removed in v1.3
fit¶
-
Trainer.fit(model, train_dataloader=None, val_dataloaders=None, datamodule=None)[source] Runs the full optimization routine.
- Parameters
datamodule¶ (
Optional[LightningDataModule]) – A instance ofLightningDataModule.model¶ (
LightningModule) – Model to fit.train_dataloader¶ (
Optional[DataLoader]) – A Pytorch DataLoader with training samples. If the model has a predefined train_dataloader method this will be skipped.val_dataloaders¶ (
Union[DataLoader,List[DataLoader],None]) – Either a single Pytorch Dataloader or a list of them, specifying validation samples. If the model has a predefined val_dataloaders method this will be skipped
test¶
-
Trainer.test(model=None, test_dataloaders=None, ckpt_path='best', verbose=True, datamodule=None)[source] Separates from fit to make sure you never run on your test set until you want to.
- Parameters
ckpt_path¶ (
Optional[str]) – Eitherbestor path to the checkpoint you wish to test. IfNone, use the weights from the last epoch to test. Default tobest.datamodule¶ (
Optional[LightningDataModule]) – A instance ofLightningDataModule.model¶ (
Optional[LightningModule]) – The model to test.test_dataloaders¶ (
Union[DataLoader,List[DataLoader],None]) – Either a single Pytorch Dataloader or a list of them, specifying validation samples.
- Returns
The final test result dictionary. If no test_epoch_end is defined returns a list of dictionaries
tune¶
-
Trainer.tune(model, train_dataloader=None, val_dataloaders=None, datamodule=None)[source] Runs routines to tune hyperparameters before training.
- Parameters
datamodule¶ (
Optional[LightningDataModule]) – A instance ofLightningDataModule.model¶ (
LightningModule) – Model to tune.train_dataloader¶ (
Optional[DataLoader]) – A Pytorch DataLoader with training samples. If the model has a predefined train_dataloader method this will be skipped.val_dataloaders¶ (
Union[DataLoader,List[DataLoader],None]) – Either a single Pytorch Dataloader or a list of them, specifying validation samples. If the model has a predefined val_dataloaders method this will be skipped
Properties¶
callback_metrics¶
The metrics available to callbacks. These are automatically set when you log via self.log
def training_step(self, batch, batch_idx):
self.log('a_val', 2)
callback_metrics = trainer.callback_metrics
assert callback_metrics['a_val'] == 2
current_epoch¶
The current epoch
def training_step(self, batch, batch_idx):
current_epoch = self.trainer.current_epoch
if current_epoch > 100:
# do something
pass
logger (p)¶
The current logger being used. Here’s an example using tensorboard
def training_step(self, batch, batch_idx):
logger = self.trainer.logger
tensorboard = logger.experiment
logged_metrics¶
The metrics sent to the logger (visualizer).
def training_step(self, batch, batch_idx):
self.log('a_val', 2, log=True)
logged_metrics = trainer.logged_metrics
assert logged_metrics['a_val'] == 2
log_dir¶
The directory for the current experiment. Use this to save images to, etc…
def training_step(self, batch, batch_idx):
img = ...
save_img(img, self.trainer.log_dir)
is_global_zero¶
Whether this process is the global zero in multi-node training
def training_step(self, batch, batch_idx):
if self.trainer.is_global_zero:
print('in node 0, accelerator 0')
progress_bar_metrics¶
The metrics sent to the progress bar.
def training_step(self, batch, batch_idx):
self.log('a_val', 2, prog_bar=True)
progress_bar_metrics = trainer.progress_bar_metrics
assert progress_bar_metrics['a_val'] == 2
Accelerators¶
Accelerators connect a Lightning Trainer to arbitrary accelerators (CPUs, GPUs, TPUs, etc). Accelerators also manage distributed accelerators (like DP, DDP, HPC cluster).
Accelerators can also be configured to run on arbitrary clusters using Plugins or to link up to arbitrary computational strategies like 16-bit precision via AMP and Apex.
Implement a custom accelerator¶
To link up arbitrary hardware, implement your own Accelerator subclass
from pytorch_lightning.accelerators.accelerator import Accelerator
class MyAccelerator(Accelerator):
def __init__(self, trainer, cluster_environment=None):
super().__init__(trainer, cluster_environment)
self.nickname = 'my_accelerator'
def setup(self):
# find local rank, etc, custom things to implement
def train(self):
# implement what happens during training
def training_step(self):
# implement how to do a training_step on this accelerator
def validation_step(self):
# implement how to do a validation_step on this accelerator
def test_step(self):
# implement how to do a test_step on this accelerator
def backward(self, closure_loss, optimizer, opt_idx, *args, **kwargs):
# implement how to do a backward pass with this accelerator
def barrier(self, name: Optional[str] = None):
# implement this accelerator's barrier
def broadcast(self, obj, src=0):
# implement this accelerator's broadcast function
def sync_tensor(self,
tensor: Union[torch.Tensor],
group: Optional[Any] = None,
reduce_op: Optional[Union[ReduceOp, str]] = None) -> torch.Tensor:
# implement how to sync tensors when reducing metrics across accelerators
Examples¶
The following examples illustrate customizing accelerators.
Example 1: Arbitrary HPC cluster¶
To link any accelerator with an arbitrary cluster (SLURM, Condor, etc), pass in a Cluster Plugin which will be passed into any accelerator.
First, implement your own ClusterEnvironment. Here is the torch elastic implementation.
import os
from pytorch_lightning import _logger as log
from pytorch_lightning.utilities import rank_zero_warn
from pytorch_lightning.cluster_environments.cluster_environment import ClusterEnvironment
class TorchElasticEnvironment(ClusterEnvironment):
def __init__(self):
super().__init__()
def master_address(self):
if "MASTER_ADDR" not in os.environ:
rank_zero_warn(
"MASTER_ADDR environment variable is not defined. Set as localhost"
)
os.environ["MASTER_ADDR"] = "127.0.0.1"
log.debug(f"MASTER_ADDR: {os.environ['MASTER_ADDR']}")
master_address = os.environ.get('MASTER_ADDR')
return master_address
def master_port(self):
if "MASTER_PORT" not in os.environ:
rank_zero_warn(
"MASTER_PORT environment variable is not defined. Set as 12910"
)
os.environ["MASTER_PORT"] = "12910"
log.debug(f"MASTER_PORT: {os.environ['MASTER_PORT']}")
port = os.environ.get('MASTER_PORT')
return port
def world_size(self):
return os.environ.get('WORLD_SIZE')
def local_rank(self):
return int(os.environ['LOCAL_RANK'])
Now, pass it into the trainer which will use Torch Elastic across your accelerator of choice.
cluster = TorchElasticEnvironment()
accelerator = MyAccelerator()
trainer = Trainer(plugins=[cluster], accelerator=MyAccelerator())
In this example, MyAccelerator can define arbitrary hardware (like IPUs or TPUs) and links it to an arbitrary compute cluster.
Available Accelerators¶
CPU Accelerator¶
-
class
pytorch_lightning.accelerators.cpu_accelerator.CPUAccelerator(trainer, cluster_environment=None)[source] Bases:
pytorch_lightning.accelerators.accelerator.AcceleratorRuns training on CPU
Example:
# default trainer = Trainer(accelerator=CPUAccelerator())
-
sync_tensor(tensor, group=None, reduce_op=None)[source] Function to reduce a tensor from several distributed processes to one aggregated tensor.
- Parameters
- Return type
- Returns
reduced value
-
DDP Accelerator¶
-
class
pytorch_lightning.accelerators.ddp_accelerator.DDPAccelerator(trainer=None, cluster_environment=None, ddp_plugin=None)[source] Bases:
pytorch_lightning.accelerators.accelerator.AcceleratorRuns training using DDP strategy on a single machine (manually, not via cluster start)
Example:
# default trainer = Trainer(accelerator=DDPAccelerator())
-
all_gather(tensor, group=None, sync_grads=False)[source] Function to gather a tensor from several distributed processes
-
configure_sync_batchnorm(model)[source] Add global batchnorm for a model spread across multiple GPUs and nodes.
Override to synchronize batchnorm between specific process groups instead of the whole world or use a different sync_bn like apex’s version.
- Parameters
model¶ (
LightningModule) – pointer to currentLightningModule.- Return type
- Returns
LightningModule with batchnorm layers synchronized between process groups
-
ddp_train(process_idx, model)[source] Entry point for ddp
-
get_reference_model(model)[source] Override to modify returning base
LightningModulewhen accessing variable and functions if the accelerator has wrapped the model.- Example::
ref_model = accelerator.get_reference_model(model) ref_model.training_step(…)
- Parameters
model¶ – Accelerator model.
Returns: Reference
LightningModule.- Return type
-
DDP2 Accelerator¶
-
class
pytorch_lightning.accelerators.ddp2_accelerator.DDP2Accelerator(trainer, cluster_environment=None, ddp_plugin=None)[source] Bases:
pytorch_lightning.accelerators.accelerator.AcceleratorRuns training using DDP2 strategy on a cluster
Example:
# default trainer = Trainer(accelerator=DDP2Accelerator())
-
all_gather(tensor, group=None, sync_grads=False)[source] Function to gather a tensor from several distributed processes
-
configure_sync_batchnorm(model)[source] Add global batchnorm for a model spread across multiple GPUs and nodes.
Override to synchronize batchnorm between specific process groups instead of the whole world or use a different sync_bn like apex’s version.
- Parameters
model¶ (
LightningModule) – pointer to currentLightningModule.- Return type
- Returns
LightningModule with batchnorm layers synchronized between process groups
-
ddp_train(process_idx, mp_queue, model)[source] Entry point for ddp
-
get_reference_model(model)[source] Override to modify returning base
LightningModulewhen accessing variable and functions if the accelerator has wrapped the model.- Example::
ref_model = accelerator.get_reference_model(model) ref_model.training_step(…)
- Parameters
model¶ – Accelerator model.
Returns: Reference
LightningModule.- Return type
-
sync_tensor(tensor, group=None, reduce_op=None)[source] Function to reduce a tensor from several distributed processes to one aggregated tensor.
- Parameters
- Return type
- Returns
reduced value
-
DDP CPU HPC Accelerator¶
-
class
pytorch_lightning.accelerators.ddp_cpu_hpc_accelerator.DDPCPUHPCAccelerator(trainer, cluster_environment=None, ddp_plugin=None)[source] Bases:
pytorch_lightning.accelerators.ddp_hpc_accelerator.DDPHPCAcceleratorRuns training using DDP (with CPUs) strategy on a cluster
Example:
# default trainer = Trainer(accelerator=DDPCPUHPCAccelerator())
DDP CPU Spawn Accelerator¶
-
class
pytorch_lightning.accelerators.ddp_cpu_spawn_accelerator.DDPCPUSpawnAccelerator(trainer, nprocs, cluster_environment=None, ddp_plugin=None)[source] Bases:
pytorch_lightning.accelerators.accelerator.AcceleratorRuns training using DDP (on a single machine or manually on multiple machines), using mp.spawn
Example:
# default trainer = Trainer(accelerator=DDPCPUSpawnAccelerator())
-
all_gather(tensor, group=None, sync_grads=False)[source] Function to gather a tensor from several distributed processes
-
configure_sync_batchnorm(model)[source] Add global batchnorm for a model spread across multiple GPUs and nodes.
Override to synchronize batchnorm between specific process groups instead of the whole world or use a different sync_bn like apex’s version.
- Parameters
model¶ (
LightningModule) – pointer to currentLightningModule.- Return type
- Returns
LightningModule with batchnorm layers synchronized between process groups
-
ddp_train(process_idx, mp_queue, model)[source] Entry point for ddp
-
get_reference_model(model)[source] Override to modify returning base
LightningModulewhen accessing variable and functions if the accelerator has wrapped the model.- Example::
ref_model = accelerator.get_reference_model(model) ref_model.training_step(…)
- Parameters
model¶ – Accelerator model.
Returns: Reference
LightningModule.- Return type
-
sync_tensor(tensor, group=None, reduce_op=None)[source] Function to reduce a tensor from several distributed processes to one aggregated tensor.
- Parameters
- Return type
- Returns
reduced value
-
DDP HPC Accelerator¶
-
class
pytorch_lightning.accelerators.ddp_hpc_accelerator.DDPHPCAccelerator(trainer, cluster_environment=None, ddp_plugin=None)[source] Bases:
pytorch_lightning.accelerators.accelerator.AcceleratorRuns training using DDP on an HPC cluster
Example:
# default trainer = Trainer(accelerator=DDPHPCAccelerator())
-
all_gather(tensor, group=None, sync_grads=False)[source] Function to gather a tensor from several distributed processes
-
configure_sync_batchnorm(model)[source] Add global batchnorm for a model spread across multiple GPUs and nodes.
Override to synchronize batchnorm between specific process groups instead of the whole world or use a different sync_bn like apex’s version.
- Parameters
model¶ (
LightningModule) – pointer to currentLightningModule.- Return type
- Returns
LightningModule with batchnorm layers synchronized between process groups
-
ddp_train(process_idx, model)[source] Entry point for ddp
-
get_reference_model(model)[source] Override to modify returning base
LightningModulewhen accessing variable and functions if the accelerator has wrapped the model.- Example::
ref_model = accelerator.get_reference_model(model) ref_model.training_step(…)
- Parameters
model¶ – Accelerator model.
Returns: Reference
LightningModule.- Return type
-
sync_tensor(tensor, group=None, reduce_op=None)[source] Function to reduce a tensor from several distributed processes to one aggregated tensor.
- Parameters
- Return type
- Returns
reduced value
-
DDP Spawn Accelerator¶
-
class
pytorch_lightning.accelerators.ddp_spawn_accelerator.DDPSpawnAccelerator(trainer, nprocs, cluster_environment=None, ddp_plugin=None)[source] Bases:
pytorch_lightning.accelerators.accelerator.AcceleratorRuns training using DDP using mp.spawn via manual launch (not cluster launch)
Example:
# default trainer = Trainer(accelerator=DDPSpawnAccelerator())
-
all_gather(tensor, group=None, sync_grads=False)[source] Function to gather a tensor from several distributed processes
-
configure_sync_batchnorm(model)[source] Add global batchnorm for a model spread across multiple GPUs and nodes.
Override to synchronize batchnorm between specific process groups instead of the whole world or use a different sync_bn like apex’s version.
- Parameters
model¶ (
LightningModule) – pointer to currentLightningModule.- Return type
- Returns
LightningModule with batchnorm layers synchronized between process groups
-
ddp_train(process_idx, mp_queue, model, is_master=False, proc_offset=0)[source] Entry point for ddp
-
get_reference_model(model)[source] Override to modify returning base
LightningModulewhen accessing variable and functions if the accelerator has wrapped the model.- Example::
ref_model = accelerator.get_reference_model(model) ref_model.training_step(…)
- Parameters
model¶ – Accelerator model.
Returns: Reference
LightningModule.- Return type
-
sync_tensor(tensor, group=None, reduce_op=None)[source] Function to reduce a tensor from several distributed processes to one aggregated tensor.
- Parameters
- Return type
- Returns
reduced value
-
GPU Accelerator¶
-
class
pytorch_lightning.accelerators.gpu_accelerator.GPUAccelerator(trainer, cluster_environment=None)[source] Bases:
pytorch_lightning.accelerators.accelerator.AcceleratorRuns training using a single GPU
Example:
# default trainer = Trainer(accelerator=GPUAccelerator())
-
sync_tensor(tensor, group=None, reduce_op=None)[source] Function to reduce a tensor from several distributed processes to one aggregated tensor.
- Parameters
- Return type
- Returns
reduced value
-
Horovod Accelerator¶
-
class
pytorch_lightning.accelerators.horovod_accelerator.HorovodAccelerator(trainer, cluster_environment=None)[source] Bases:
pytorch_lightning.accelerators.accelerator.AcceleratorRuns training using horovod
Example:
# default trainer = Trainer(accelerator=HorovodAccelerator())
-
sync_tensor(tensor, group=None, reduce_op=None)[source] Function to reduce a tensor from several distributed processes to one aggregated tensor.
- Parameters
- Return type
- Returns
reduced value
-
TPU Accelerator¶
-
class
pytorch_lightning.accelerators.tpu_accelerator.TPUAccelerator(trainer, cluster_environment=None)[source] Bases:
pytorch_lightning.accelerators.accelerator.AcceleratorRuns training using TPUs (colab, single machine or pod)
Example:
# default trainer = Trainer(accelerator=TPUAccelerator())
-
load_spawn_weights(original_model)[source] Load the temp weights saved in the process To recover the trained model from the ddp process we load the saved weights
-
on_save(checkpoint)[source] Move XLA tensors to CPU before saving Recommended on XLA Guide: https://github.com/pytorch/xla/blob/master/API_GUIDE.md#saving-and-loading-xla-tensors
-
save_spawn_weights(model)[source] Dump a temporary checkpoint after ddp ends to get weights out of the process
-
sync_tensor(tensor, group=None, reduce_op=None)[source] Function to reduce a tensor from several distributed processes to one aggregated tensor.
- Parameters
- Return type
- Returns
reduced value
-
to_device(batch)[source] Transfers the data to the TPU.
- Parameters
- Returns
the tensor on the TPU device.
See also
move_data_to_device()
-
tpu_train_in_process(tpu_core_idx, model, trainer=None, mp_queue=None)[source] Here we are inside each individual process
-
Callback¶
A callback is a self-contained program that can be reused across projects.
Lightning has a callback system to execute callbacks when needed. Callbacks should capture NON-ESSENTIAL logic that is NOT required for your LightningModule to run.
Here’s the flow of how the callback hooks are executed:
An overall Lightning system should have:
Trainer for all engineering
LightningModule for all research code.
Callbacks for non-essential code.
Example:
from pytorch_lightning.callbacks import Callback
class MyPrintingCallback(Callback):
def on_init_start(self, trainer):
print('Starting to init trainer!')
def on_init_end(self, trainer):
print('trainer is init now')
def on_train_end(self, trainer, pl_module):
print('do something when training ends')
trainer = Trainer(callbacks=[MyPrintingCallback()])
Starting to init trainer!
trainer is init now
We successfully extended functionality without polluting our super clean LightningModule research code.
Examples¶
You can do pretty much anything with callbacks.
Built-in Callbacks¶
Lightning has a few built-in callbacks.
Note
For a richer collection of callbacks, check out our bolts library.
Abstract base class used to build new callbacks. |
|
Monitor a metric and stop training when it stops improving. |
|
Automatically monitors and logs GPU stats during training stage. |
|
Change gradient accumulation factor according to scheduling. |
|
Automatically monitor and logs learning rate for learning rate schedulers during training. |
|
Save the model after every epoch by monitoring a quantity. |
|
This is the default progress bar used by Lightning. |
|
The base class for progress bars in Lightning. |
Persisting State¶
Some callbacks require internal state in order to function properly. You can optionally
choose to persist your callback’s state as part of model checkpoint files using the callback hooks
on_save_checkpoint() and on_load_checkpoint().
However, you must follow two constraints:
Your returned state must be able to be pickled.
You can only use one instance of that class in the Trainer callbacks list. We don’t support persisting state for multiple callbacks of the same class.
Best Practices¶
The following are best practices when using/designing callbacks.
Callbacks should be isolated in their functionality.
Your callback should not rely on the behavior of other callbacks in order to work properly.
Do not manually call methods from the callback.
Directly calling methods (eg. on_validation_end) is strongly discouraged.
Whenever possible, your callbacks should not depend on the order in which they are executed.
Available Callback hooks¶
on_init_start¶
-
Callback.on_init_start(trainer)[source] Called when the trainer initialization begins, model has not yet been set.
on_init_end¶
-
Callback.on_init_end(trainer)[source] Called when the trainer initialization ends, model has not yet been set.
on_fit_start¶
-
Callback.on_save_checkpoint(trainer, pl_module)[source] Called when saving a model checkpoint, use to persist state.
on_sanity_check_start¶
-
Callback.on_sanity_check_start(trainer, pl_module)[source] Called when the validation sanity check starts.
on_sanity_check_end¶
-
Callback.on_sanity_check_end(trainer, pl_module)[source] Called when the validation sanity check ends.
on_train_batch_start¶
-
Callback.on_train_batch_start(trainer, pl_module, batch, batch_idx, dataloader_idx)[source] Called when the train batch begins.
on_train_batch_end¶
-
Callback.on_train_batch_end(trainer, pl_module, outputs, batch, batch_idx, dataloader_idx)[source] Called when the train batch ends.
on_train_epoch_start¶
-
Callback.on_train_epoch_start(trainer, pl_module)[source] Called when the train epoch begins.
on_train_epoch_end¶
-
Callback.on_train_epoch_end(trainer, pl_module, outputs)[source] Called when the train epoch ends.
on_validation_epoch_start¶
-
Callback.on_validation_epoch_start(trainer, pl_module)[source] Called when the val epoch begins.
on_validation_epoch_end¶
-
Callback.on_validation_epoch_end(trainer, pl_module)[source] Called when the val epoch ends.
on_test_epoch_start¶
-
Callback.on_test_epoch_start(trainer, pl_module)[source] Called when the test epoch begins.
on_test_epoch_end¶
-
Callback.on_test_epoch_end(trainer, pl_module)[source] Called when the test epoch ends.
on_batch_start¶
-
Callback.on_batch_start(trainer, pl_module)[source] Called when the training batch begins.
on_validation_batch_start¶
-
Callback.on_validation_batch_start(trainer, pl_module, batch, batch_idx, dataloader_idx)[source] Called when the validation batch begins.
on_validation_batch_end¶
-
Callback.on_validation_batch_end(trainer, pl_module, outputs, batch, batch_idx, dataloader_idx)[source] Called when the validation batch ends.
on_test_batch_start¶
-
Callback.on_test_batch_start(trainer, pl_module, batch, batch_idx, dataloader_idx)[source] Called when the test batch begins.
on_test_batch_end¶
-
Callback.on_test_batch_end(trainer, pl_module, outputs, batch, batch_idx, dataloader_idx)[source] Called when the test batch ends.
on_batch_end¶
-
Callback.on_batch_end(trainer, pl_module)[source] Called when the training batch ends.
on_pretrain_routine_start¶
-
Callback.on_pretrain_routine_start(trainer, pl_module)[source] Called when the pretrain routine begins.
on_pretrain_routine_end¶
-
Callback.on_pretrain_routine_end(trainer, pl_module)[source] Called when the pretrain routine ends.
on_validation_start¶
-
Callback.on_validation_start(trainer, pl_module)[source] Called when the validation loop begins.
on_validation_end¶
-
Callback.on_validation_end(trainer, pl_module)[source] Called when the validation loop ends.
on_keyboard_interrupt¶
-
Callback.on_keyboard_interrupt(trainer, pl_module)[source] Called when the training is interrupted by KeyboardInterrupt.
LightningDataModule¶
A datamodule is a shareable, reusable class that encapsulates all the steps needed to process data:
A datamodule encapsulates the five steps involved in data processing in PyTorch:
Download / tokenize / process.
Clean and (maybe) save to disk.
Load inside
Dataset.Apply transforms (rotate, tokenize, etc…).
Wrap inside a
DataLoader.
This class can then be shared and used anywhere:
from pl_bolts.datamodules import CIFAR10DataModule, ImagenetDataModule
model = LitClassifier()
trainer = Trainer()
imagenet = ImagenetDataModule()
trainer.fit(model, imagenet)
cifar10 = CIFAR10DataModule()
trainer.fit(model, cifar10)
Why do I need a DataModule?¶
In normal PyTorch code, the data cleaning/preparation is usually scattered across many files. This makes sharing and reusing the exact splits and transforms across projects impossible.
Datamodules are for you if you ever asked the questions:
what splits did you use?
what transforms did you use?
what normalization did you use?
how did you prepare/tokenize the data?
What is a DataModule¶
A DataModule is simply a collection of a train_dataloader, val_dataloader(s), test_dataloader(s) along with the matching transforms and data processing/downloads steps required.
Here’s a simple PyTorch example:
# regular PyTorch
test_data = MNIST(PATH, train=False, download=True)
train_data = MNIST(PATH, train=True, download=True)
train_data, val_data = random_split(train_data, [55000, 5000])
train_loader = DataLoader(train_data, batch_size=32)
val_loader = DataLoader(val_data, batch_size=32)
test_loader = DataLoader(test_data, batch_size=32)
The equivalent DataModule just organizes the same exact code, but makes it reusable across projects.
class MNISTDataModule(pl.LightningDataModule):
def __init__(self, data_dir: str = PATH, batch_size):
super().__init__()
self.batch_size = batch_size
def setup(self, stage=None):
self.mnist_test = MNIST(self.data_dir, train=False)
mnist_full = MNIST(self.data_dir, train=True)
self.mnist_train, self.mnist_val = random_split(mnist_full, [55000, 5000])
def train_dataloader(self):
return DataLoader(self.mnist_train, batch_size=self.batch_size)
def val_dataloader(self):
return DataLoader(self.mnist_val, batch_size=self.batch_size)
def test_dataloader(self):
return DataLoader(self.mnist_test, batch_size=self.batch_size)
But now, as the complexity of your processing grows (transforms, multiple-GPU training), you can let Lightning handle those details for you while making this dataset reusable so you can share with colleagues or use in different projects.
mnist = MNISTDataModule(PATH)
model = LitClassifier()
trainer = Trainer()
trainer.fit(model, mnist)
Here’s a more realistic, complex DataModule that shows how much more reusable the datamodule is.
import pytorch_lightning as pl
from torch.utils.data import random_split, DataLoader
# Note - you must have torchvision installed for this example
from torchvision.datasets import MNIST
from torchvision import transforms
class MNISTDataModule(pl.LightningDataModule):
def __init__(self, data_dir: str = './'):
super().__init__()
self.data_dir = data_dir
self.transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])
# self.dims is returned when you call dm.size()
# Setting default dims here because we know them.
# Could optionally be assigned dynamically in dm.setup()
self.dims = (1, 28, 28)
def prepare_data(self):
# download
MNIST(self.data_dir, train=True, download=True)
MNIST(self.data_dir, train=False, download=True)
def setup(self, stage=None):
# Assign train/val datasets for use in dataloaders
if stage == 'fit' or stage is None:
mnist_full = MNIST(self.data_dir, train=True, transform=self.transform)
self.mnist_train, self.mnist_val = random_split(mnist_full, [55000, 5000])
# Optionally...
# self.dims = tuple(self.mnist_train[0][0].shape)
# Assign test dataset for use in dataloader(s)
if stage == 'test' or stage is None:
self.mnist_test = MNIST(self.data_dir, train=False, transform=self.transform)
# Optionally...
# self.dims = tuple(self.mnist_test[0][0].shape)
def train_dataloader(self):
return DataLoader(self.mnist_train, batch_size=32)
def val_dataloader(self):
return DataLoader(self.mnist_val, batch_size=32)
def test_dataloader(self):
return DataLoader(self.mnist_test, batch_size=32)
Note
setup expects a string arg stage. It is used to separate setup logic for trainer.fit and trainer.test.
LightningDataModule API¶
To define a DataModule define 5 methods:
prepare_data (how to download(), tokenize, etc…)
setup (how to split, etc…)
train_dataloader
val_dataloader(s)
test_dataloader(s)
prepare_data¶
Use this method to do things that might write to disk or that need to be done only from a single GPU in distributed settings.
download
tokenize
etc…
class MNISTDataModule(pl.LightningDataModule):
def prepare_data(self):
# download
MNIST(os.getcwd(), train=True, download=True, transform=transforms.ToTensor())
MNIST(os.getcwd(), train=False, download=True, transform=transforms.ToTensor())
Warning
prepare_data is called from a single GPU. Do not use it to assign state (self.x = y).
setup¶
There are also data operations you might want to perform on every GPU. Use setup to do things like:
count number of classes
build vocabulary
perform train/val/test splits
apply transforms (defined explicitly in your datamodule or assigned in init)
etc…
import pytorch_lightning as pl
class MNISTDataModule(pl.LightningDataModule):
def setup(self, stage: Optional[str] = None):
# Assign Train/val split(s) for use in Dataloaders
if stage == 'fit' or stage is None:
mnist_full = MNIST(
self.data_dir,
train=True,
download=True,
transform=self.transform
)
self.mnist_train, self.mnist_val = random_split(mnist_full, [55000, 5000])
self.dims = self.mnist_train[0][0].shape
# Assign Test split(s) for use in Dataloaders
if stage == 'test' or stage is None:
self.mnist_test = MNIST(
self.data_dir,
train=False,
download=True,
transform=self.transform
)
self.dims = getattr(self, 'dims', self.mnist_test[0][0].shape)
Warning
setup is called from every GPU. Setting state here is okay.
train_dataloader¶
Use this method to generate the train dataloader. Usually you just wrap the dataset you defined in setup.
import pytorch_lightning as pl
class MNISTDataModule(pl.LightningDataModule):
def train_dataloader(self):
return DataLoader(self.mnist_train, batch_size=64)
val_dataloader¶
Use this method to generate the val dataloader. Usually you just wrap the dataset you defined in setup.
import pytorch_lightning as pl
class MNISTDataModule(pl.LightningDataModule):
def val_dataloader(self):
return DataLoader(self.mnist_val, batch_size=64)
test_dataloader¶
Use this method to generate the test dataloader. Usually you just wrap the dataset you defined in setup.
import pytorch_lightning as pl
class MNISTDataModule(pl.LightningDataModule):
def test_dataloader(self):
return DataLoader(self.mnist_test, batch_size=64)
transfer_batch_to_device¶
Override to define how you want to move an arbitrary batch to a device
import pytorch_lightning as pl
class MNISTDataModule(pl.LightningDataModule):
def transfer_batch_to_device(self, batch, device):
x = batch['x']
x = CustomDataWrapper(x)
batch['x'].to(device)
return batch
Note
To decouple your data from transforms you can parametrize them via __init__.
class MNISTDataModule(pl.LightningDataModule):
def __init__(self, train_transforms, val_transforms, test_transforms):
super().__init__()
self.train_transforms = train_transforms
self.val_transforms = val_transforms
self.test_transforms = test_transforms
Using a DataModule¶
The recommended way to use a DataModule is simply:
dm = MNISTDataModule()
model = Model()
trainer.fit(model, dm)
trainer.test(datamodule=dm)
If you need information from the dataset to build your model, then run prepare_data and setup manually (Lightning still ensures the method runs on the correct devices)
dm = MNISTDataModule()
dm.prepare_data()
dm.setup('fit')
model = Model(num_classes=dm.num_classes, width=dm.width, vocab=dm.vocab)
trainer.fit(model, dm)
dm.setup('test')
trainer.test(datamodule=dm)
Datamodules without Lightning¶
You can of course use DataModules in plain PyTorch code as well.
# download, etc...
dm = MNISTDataModule()
dm.prepare_data()
# splits/transforms
dm.setup('fit')
# use data
for batch in dm.train_dataloader():
...
for batch in dm.val_dataloader():
...
# lazy load test data
dm.setup('test')
for batch in dm.test_dataloader():
...
But overall, DataModules encourage reproducibility by allowing all details of a dataset to be specified in a unified structure.
Logging¶
Lightning supports the most popular logging frameworks (TensorBoard, Comet, etc…).
To use a logger, simply pass it into the Trainer.
Lightning uses TensorBoard by default.
from pytorch_lightning import loggers as pl_loggers
tb_logger = pl_loggers.TensorBoardLogger('logs/')
trainer = Trainer(logger=tb_logger)
Choose from any of the others such as MLflow, Comet, Neptune, WandB, …
comet_logger = pl_loggers.CometLogger(save_dir='logs/')
trainer = Trainer(logger=comet_logger)
To use multiple loggers, simply pass in a list or tuple of loggers …
tb_logger = pl_loggers.TensorBoardLogger('logs/')
comet_logger = pl_loggers.CometLogger(save_dir='logs/')
trainer = Trainer(logger=[tb_logger, comet_logger])
Note
By default, lightning logs every 50 steps. Use Trainer flags to Control logging frequency.
Note
All loggers log by default to os.getcwd(). To change the path without creating a logger set Trainer(default_root_dir=’/your/path/to/save/checkpoints’)
Logging from a LightningModule¶
Lightning offers automatic log functionalities for logging scalars, or manual logging for anything else.
Automatic Logging¶
Use the log()
method to log from anywhere in a LightningModule and Callback
except functions with batch_start in their names.
def training_step(self, batch, batch_idx):
self.log('my_metric', x)
Depending on where log is called from, Lightning auto-determines the correct logging mode for you. But of course you can override the default behavior by manually setting the log() parameters.
def training_step(self, batch, batch_idx):
self.log('my_loss', loss, on_step=True, on_epoch=True, prog_bar=True, logger=True)
The log() method has a few options:
on_step: Logs the metric at the current step. Defaults to True in
training_step(), andtraining_step_end().on_epoch: Automatically accumulates and logs at the end of the epoch. Defaults to True anywhere in validation or test loops, and in
training_epoch_end().prog_bar: Logs to the progress bar.
logger: Logs to the logger like Tensorboard, or any other custom logger passed to the
Trainer.
Note
Setting
on_epoch=Truewill cache all your logged values during the full training epoch and perform a reduction on_epoch_end. We recommend using the Metrics API when working with custom reduction.Setting both
on_step=Trueandon_epoch=Truewill create two keys per metric you log with suffix_stepand_epoch, respectively. You can refer to these keys e.g. in the monitor argument ofModelCheckpointor in the graphs plotted to the logger of your choice.
If your work requires to log in an unsupported function, please open an issue with a clear description of why it is blocking you.
Manual logging¶
If you want to log anything that is not a scalar, like histograms, text, images, etc… you may need to use the logger object directly.
def training_step(...):
...
# the logger you used (in this case tensorboard)
tensorboard = self.logger.experiment
tensorboard.add_image()
tensorboard.add_histogram(...)
tensorboard.add_figure(...)
Access your logs¶
Once your training starts, you can view the logs by using your favorite logger or booting up the Tensorboard logs:
tensorboard --logdir ./lightning_logs
Make a custom logger¶
You can implement your own logger by writing a class that inherits from LightningLoggerBase.
Use the rank_zero_experiment() and rank_zero_only() decorators to make sure that only the first process in DDP training creates the experiment and logs the data respectively.
from pytorch_lightning.utilities import rank_zero_only
from pytorch_lightning.loggers import LightningLoggerBase
from pytorch_lightning.loggers.base import rank_zero_experiment
class MyLogger(LightningLoggerBase):
@property
def name(self):
return 'MyLogger'
@property
@rank_zero_experiment
def experiment(self):
# Return the experiment object associated with this logger.
pass
@property
def version(self):
# Return the experiment version, int or str.
return '0.1'
@rank_zero_only
def log_hyperparams(self, params):
# params is an argparse.Namespace
# your code to record hyperparameters goes here
pass
@rank_zero_only
def log_metrics(self, metrics, step):
# metrics is a dictionary of metric names and values
# your code to record metrics goes here
pass
@rank_zero_only
def save(self):
# Optional. Any code necessary to save logger data goes here
# If you implement this, remember to call `super().save()`
# at the start of the method (important for aggregation of metrics)
super().save()
@rank_zero_only
def finalize(self, status):
# Optional. Any code that needs to be run after training
# finishes goes here
pass
If you write a logger that may be useful to others, please send a pull request to add it to Lightning!
Control logging frequency¶
Logging frequency¶
It may slow training down to log every single batch. By default, Lightning logs every 50 rows, or 50 training steps.
To change this behaviour, set the log_every_n_steps Trainer flag.
k = 10
trainer = Trainer(log_every_n_steps=k)
Log writing frequency¶
Writing to a logger can be expensive, so by default Lightning write logs to disc or to the given logger every 100 training steps.
To change this behaviour, set the interval at which you wish to flush logs to the filesystem using log_every_n_steps Trainer flag.
k = 100
trainer = Trainer(flush_logs_every_n_steps=k)
Unlike the log_every_n_steps, this argument does not apply to all loggers.
The example shown here works with TensorBoardLogger,
which is the default logger in Lightning.
Progress Bar¶
You can add any metric to the progress bar using log()
method, setting prog_bar=True.
def training_step(self, batch, batch_idx):
self.log('my_loss', loss, prog_bar=True)
Modifying the progress bar¶
The progress bar by default already includes the training loss and version number of the experiment
if you are using a logger. These defaults can be customized by overriding the
get_progress_bar_dict() hook in your module.
def get_progress_bar_dict(self):
# don't show the version number
items = super().get_progress_bar_dict()
items.pop("v_num", None)
return items
Configure console logging¶
Lightning logs useful information about the training process and user warnings to the console. You can retrieve the Lightning logger and change it to your liking. For example, adjust the logging level or redirect output for certain modules to log files:
import logging
# configure logging at the root level of lightning
logging.getLogger("pytorch_lightning").setLevel(logging.ERROR)
# configure logging on module level, redirect to file
logger = logging.getLogger("pytorch_lightning.core")
logger.addHandler(logging.FileHandler("core.log"))
Read more about custom Python logging here.
Logging hyperparameters¶
When training a model, it’s useful to know what hyperparams went into that model. When Lightning creates a checkpoint, it stores a key “hyper_parameters” with the hyperparams.
lightning_checkpoint = torch.load(filepath, map_location=lambda storage, loc: storage)
hyperparams = lightning_checkpoint['hyper_parameters']
Some loggers also allow logging the hyperparams used in the experiment. For instance, when using the TestTubeLogger or the TensorBoardLogger, all hyperparams will show in the hparams tab.
Snapshot code¶
Loggers also allow you to snapshot a copy of the code used in this experiment. For example, TestTubeLogger does this with a flag:
from pytorch_lightning.loggers import TestTubeLogger
logger = TestTubeLogger('.', create_git_tag=True)
Supported Loggers¶
The following are loggers we support
Note
The following loggers will normally plot an additional chart (global_step VS epoch).
Note
postfix _step and _epoch will be appended to the name you logged
if on_step and on_epoch are set to True in self.log().
Note
Depending on the loggers you use, there might be some additional charts.
Log using Comet.ml. |
|
Log to local file system in yaml and CSV format. |
|
Log using MLflow. |
|
Log using Neptune. |
|
Log to local file system in TensorBoard format. |
|
Log to local file system in TensorBoard format but using a nicer folder structure (see full docs). |
|
Log using Weights and Biases. |
Metrics¶
pytorch_lightning.metrics is a Metrics API created for easy metric development and usage in
PyTorch and PyTorch Lightning. It is rigorously tested for all edge cases and includes a growing list of
common metric implementations.
The metrics API provides update(), compute(), reset() functions to the user. The metric base class inherits
nn.Module which allows us to call metric(...) directly. The forward() method of the base Metric class
serves the dual purpose of calling update() on its input and simultaneously returning the value of the metric over the
provided input.
These metrics work with DDP in PyTorch and PyTorch Lightning by default. When .compute() is called in
distributed mode, the internal state of each metric is synced and reduced across each process, so that the
logic present in .compute() is applied to state information from all processes.
The example below shows how to use a metric in your LightningModule:
def __init__(self):
...
self.accuracy = pl.metrics.Accuracy()
def training_step(self, batch, batch_idx):
x, y = batch
preds = self(x)
...
# log step metric
self.log('train_acc_step', self.accuracy(preds, y))
...
def training_epoch_end(self, outs):
# log epoch metric
self.log('train_acc_epoch', self.accuracy.compute())
Metric objects can also be directly logged, in which case Lightning will log
the metric based on on_step and on_epoch flags present in self.log(...).
If on_epoch is True, the logger automatically logs the end of epoch metric value by calling
.compute().
Note
sync_dist, sync_dist_op, sync_dist_group, reduce_fx and tbptt_reduce_fx
flags from self.log(...) don’t affect the metric logging in any manner. The metric class
contains its own distributed synchronization logic.
This however is only true for metrics that inherit the base class Metric,
and thus the functional metric API provides no support for in-built distributed synchronization
or reduction functions.
def __init__(self):
...
self.train_acc = pl.metrics.Accuracy()
self.valid_acc = pl.metrics.Accuracy()
def training_step(self, batch, batch_idx):
x, y = batch
preds = self(x)
...
self.train_acc(preds, y)
self.log('train_acc', self.train_acc, on_step=True, on_epoch=False)
def validation_step(self, batch, batch_idx):
logits = self(x)
...
self.valid_acc(logits, y)
self.log('valid_acc', self.valid_acc, on_step=True, on_epoch=True)
Note
If using metrics in data parallel mode (dp), the metric update/logging should be done
in the <mode>_step_end method (where <mode> is either training, validation
or test). This is due to metric states else being destroyed after each forward pass,
leading to wrong accumulation. In practice do the following:
def training_step(self, batch, batch_idx):
data, target = batch
preds = self(data)
...
return {'loss' : loss, 'preds' : preds, 'target' : target}
def training_step_end(self, outputs):
#update and log
self.metric(outputs['preds'], outputs['target'])
self.log('metric', self.metric)
This metrics API is independent of PyTorch Lightning. Metrics can directly be used in PyTorch as shown in the example:
from pytorch_lightning import metrics
train_accuracy = metrics.Accuracy()
valid_accuracy = metrics.Accuracy(compute_on_step=False)
for epoch in range(epochs):
for x, y in train_data:
y_hat = model(x)
# training step accuracy
batch_acc = train_accuracy(y_hat, y)
for x, y in valid_data:
y_hat = model(x)
valid_accuracy(y_hat, y)
# total accuracy over all training batches
total_train_accuracy = train_accuracy.compute()
# total accuracy over all validation batches
total_valid_accuracy = valid_accuracy.compute()
Note
Metrics contain internal states that keep track of the data seen so far. Do not mix metric states across training, validation and testing. It is highly recommended to re-initialize the metric per mode as shown in the examples above.
Note
Metric states are not added to the models state_dict by default.
To change this, after initializing the metric, the method .persistent(mode) can
be used to enable (mode=True) or disable (mode=False) this behaviour.
Metrics and devices¶
Metrics are simple subclasses of Module and their metric states behave
similar to buffers and parameters of modules. This means that metrics states should
be moved to the same device as the input of the metric:
import torch
from pytorch_lightning.metrics import Accuracy
target = torch.tensor([1, 1, 0, 0], device=torch.device("cuda", 0))
preds = torch.tensor([0, 1, 0, 0], device=torch.device("cuda", 0))
# Metric states are always initialized on cpu, and needs to be moved to
# the correct device
confmat = Accuracy(num_classes=2).to(torch.device("cuda", 0))
out = confmat(preds, target)
print(out.device) # cuda:0
However, when properly defined inside a LightningModule
, Lightning will automatically move the metrics to the same device as the data. Being
properly defined means that the metric is correctly identified as a child module of the
model (check .children() attribute of the model). Therefore, metrics cannot be placed
in native python list and dict, as they will not be correctly identified
as child modules. Instead of list use ModuleList and instead of
dict use ModuleDict.
class MyModule(LightningModule):
def __init__(self):
...
# valid ways metrics will be identified as child modules
self.metric1 = pl.metrics.Accuracy()
self.metric2 = torch.nn.ModuleList(pl.metrics.Accuracy())
self.metric3 = torch.nn.ModuleDict({'accuracy': Accuracy()})
def training_step(self, batch, batch_idx):
# all metrics will be on the same device as the input batch
data, target = batch
preds = self(data)
...
val1 = self.metric1(preds, target)
val2 = self.metric2[0](preds, target)
val3 = self.metric3['accuracy'](preds, target)
Implementing a Metric¶
To implement your custom metric, subclass the base Metric class and implement the following methods:
__init__(): Each state variable should be called usingself.add_state(...).update(): Any code needed to update the state given any inputs to the metric.compute(): Computes a final value from the state of the metric.
All you need to do is call add_state correctly to implement a custom metric with DDP.
reset() is called on metric state variables added using add_state().
To see how metric states are synchronized across distributed processes, refer to add_state() docs
from the base Metric class.
Example implementation:
from pytorch_lightning.metrics import Metric
class MyAccuracy(Metric):
def __init__(self, dist_sync_on_step=False):
super().__init__(dist_sync_on_step=dist_sync_on_step)
self.add_state("correct", default=torch.tensor(0), dist_reduce_fx="sum")
self.add_state("total", default=torch.tensor(0), dist_reduce_fx="sum")
def update(self, preds: torch.Tensor, target: torch.Tensor):
preds, target = self._input_format(preds, target)
assert preds.shape == target.shape
self.correct += torch.sum(preds == target)
self.total += target.numel()
def compute(self):
return self.correct.float() / self.total
Metrics support backpropagation, if all computations involved in the metric calculation are differentiable. However, note that the cached state is detached from the computational graph and cannot be backpropagated. Not doing this would mean storing the computational graph for each update call, which can lead to out-of-memory errors. In practise this means that:
metric = MyMetric()
val = metric(pred, target) # this value can be backpropagated
val = metric.compute() # this value cannot be backpropagated
Metric API¶
-
class
pytorch_lightning.metrics.Metric(compute_on_step=True, dist_sync_on_step=False, process_group=None, dist_sync_fn=None)[source] Bases:
torch.nn.Module,abc.ABCBase class for all metrics present in the Metrics API.
Implements
add_state(),forward(),reset()and a few other things to handle distributed synchronization and per-step metric computation.Override
update()andcompute()functions to implement your own metric. Useadd_state()to register metric state variables which keep track of state on each call ofupdate()and are synchronized across processes whencompute()is called.Note
Metric state variables can either be
torch.Tensorsor an empty list which can we used to store torch.Tensors`.Note
Different metrics only override
update()and notforward(). A call toupdate()is valid, but it won’t return the metric value at the current step. A call toforward()automatically callsupdate()and also returns the metric value at the current step.- Parameters
compute_on_step¶ (
bool) – Forward only callsupdate()and returns None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step.process_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)dist_sync_fn¶ (
Optional[Callable]) – Callback that performs the allgather operation on the metric state. When None, DDP will be used to perform the allgather. default: None
-
add_state(name, default, dist_reduce_fx=None, persistent=False)[source] Adds metric state variable. Only used by subclasses.
- Parameters
name¶ (
str) – The name of the state variable. The variable will then be accessible atself.name.default¶ – Default value of the state; can either be a
torch.Tensoror an empty list. The state will be reset to this value whenself.reset()is called.dist_reduce_fx¶ (Optional) – Function to reduce state accross mutliple processes in distributed mode. If value is
"sum","mean", or"cat", we will usetorch.sum,torch.mean, andtorch.catrespectively, each with argumentdim=0. Note that the"cat"reduction only makes sense if the state is a list, and not a tensor. The user can also pass a custom function in this parameter.persistent¶ (Optional) – whether the state will be saved as part of the modules
state_dict. Default isFalse.
Note
Setting
dist_reduce_fxto None will return the metric state synchronized across different processes. However, there won’t be any reduction function applied to the synchronized metric state.The metric states would be synced as follows
If the metric state is
torch.Tensor, the synced value will be a stackedtorch.Tensoracross the process dimension if the metric state was atorch.Tensor. The originaltorch.Tensormetric state retains dimension and hence the synchronized output will be of shape(num_process, ...).If the metric state is a
list, the synced value will be alistcontaining the combined elements from all processes.
Note
When passing a custom function to
dist_reduce_fx, expect the synchronized metric state to follow the format discussed in the above note.
-
abstract
compute()[source] Override this method to compute the final metric value from state variables synchronized across the distributed backend.
-
forward(*args, **kwargs)[source] Automatically calls
update(). Returns the metric value over inputs ifcompute_on_stepis True.
-
persistent(mode=False)[source] Method for post-init to change if metric states should be saved to its state_dict
-
reset()[source] This method automatically resets the metric state variables to their default value.
-
abstract
update()[source] Override this method to update the state variables of your metric class.
- Return type
None
Class vs Functional Metrics¶
The functional metrics follow the simple paradigm input in, output out. This means, they don’t provide any advanced mechanisms for syncing across DDP nodes or aggregation over batches. They simply compute the metric value based on the given inputs.
Also, the integration within other parts of PyTorch Lightning will never be as tight as with the class-based interface. If you look for just computing the values, the functional metrics are the way to go. However, if you are looking for the best integration and user experience, please consider also using the class interface.
Classification Metrics¶
Input types¶
For the purposes of classification metrics, inputs (predictions and targets) are split
into these categories (N stands for the batch size and C for number of classes):
Type |
preds shape |
preds dtype |
target shape |
target dtype |
|---|---|---|---|---|
Binary |
(N,) |
|
(N,) |
|
Multi-class |
(N,) |
|
(N,) |
|
Multi-class with probabilities |
(N, C) |
|
(N,) |
|
Multi-label |
(N, …) |
|
(N, …) |
|
Multi-dimensional multi-class |
(N, …) |
|
(N, …) |
|
Multi-dimensional multi-class with probabilities |
(N, C, …) |
|
(N, …) |
|
Note
All dimensions of size 1 (except N) are “squeezed out” at the beginning, so
that, for example, a tensor of shape (N, 1) is treated as (N, ).
When predictions or targets are integers, it is assumed that class labels start at 0, i.e. the possible class labels are 0, 1, 2, 3, etc. Below are some examples of different input types
# Binary inputs
binary_preds = torch.tensor([0.6, 0.1, 0.9])
binary_target = torch.tensor([1, 0, 2])
# Multi-class inputs
mc_preds = torch.tensor([0, 2, 1])
mc_target = torch.tensor([0, 1, 2])
# Multi-class inputs with probabilities
mc_preds_probs = torch.tensor([[0.8, 0.2, 0], [0.1, 0.2, 0.7], [0.3, 0.6, 0.1]])
mc_target_probs = torch.tensor([0, 1, 2])
# Multi-label inputs
ml_preds = torch.tensor([[0.2, 0.8, 0.9], [0.5, 0.6, 0.1], [0.3, 0.1, 0.1]])
ml_target = torch.tensor([[0, 1, 1], [1, 0, 0], [0, 0, 0]])
In some rare cases, you might have inputs which appear to be (multi-dimensional) multi-class but are actually binary/multi-label. For example, if both predictions and targets are 1d binary tensors. Or it could be the other way around, you want to treat binary/multi-label inputs as 2-class (multi-dimensional) multi-class inputs.
For these cases, the metrics where this distinction would make a difference, expose the
is_multiclass argument.
Class Metrics (Classification)¶
Accuracy¶
-
class
pytorch_lightning.metrics.classification.Accuracy(threshold=0.5, compute_on_step=True, dist_sync_on_step=False, process_group=None, dist_sync_fn=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes Accuracy:

Where
 is a tensor of target values, and
is a tensor of target values, and  is a
tensor of predictions. Works with binary, multiclass, and multilabel
data. Accepts logits from a model output or integer class values in
prediction. Works with multi-dimensional preds and target.
is a
tensor of predictions. Works with binary, multiclass, and multilabel
data. Accepts logits from a model output or integer class values in
prediction. Works with multi-dimensional preds and target.Forward accepts
preds(float or long tensor):(N, ...)or(N, C, ...)where C is the number of classestarget(long tensor):(N, ...)
If preds and target are the same shape and preds is a float tensor, we use the
self.thresholdargument. This is the case for binary and multi-label logits.If preds has an extra dimension as in the case of multi-class scores we perform an argmax on
dim=1.- Parameters
threshold¶ (
float) – Threshold value for binary or multi-label logits. default: 0.5compute_on_step¶ (
bool) – Forward only callsupdate()and return None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)dist_sync_fn¶ (
Optional[Callable]) – Callback that performs the allgather operation on the metric state. When None, DDP will be used to perform the allgather. default: None
Example
>>> from pytorch_lightning.metrics import Accuracy >>> target = torch.tensor([0, 1, 2, 3]) >>> preds = torch.tensor([0, 2, 1, 3]) >>> accuracy = Accuracy() >>> accuracy(preds, target) tensor(0.5000)
-
compute()[source] Computes accuracy over state.
AveragePrecision¶
-
class
pytorch_lightning.metrics.classification.AveragePrecision(num_classes=None, pos_label=None, compute_on_step=True, dist_sync_on_step=False, process_group=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes the average precision score, which summarises the precision recall curve into one number. Works for both binary and multiclass problems. In the case of multiclass, the values will be calculated based on a one-vs-the-rest approach.
Forward accepts
preds(float tensor):(N, ...)(binary) or(N, C, ...)(multiclass) where C is the number of classestarget(long tensor):(N, ...)
- Parameters
num_classes¶ (
Optional[int]) – integer with number of classes. Not nessesary to provide for binary problems.pos_label¶ (
Optional[int]) – integer determining the positive class. Default isNonewhich for binary problem is translate to 1. For multiclass problems this argument should not be set as we iteratively change it in the range [0,num_classes-1]compute_on_step¶ (
bool) – Forward only callsupdate()and return None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)
Example (binary case):
>>> pred = torch.tensor([0, 1, 2, 3]) >>> target = torch.tensor([0, 1, 1, 1]) >>> average_precision = AveragePrecision(pos_label=1) >>> average_precision(pred, target) tensor(1.)
Example (multiclass case):
>>> pred = torch.tensor([[0.75, 0.05, 0.05, 0.05, 0.05], ... [0.05, 0.75, 0.05, 0.05, 0.05], ... [0.05, 0.05, 0.75, 0.05, 0.05], ... [0.05, 0.05, 0.05, 0.75, 0.05]]) >>> target = torch.tensor([0, 1, 3, 2]) >>> average_precision = AveragePrecision(num_classes=5) >>> average_precision(pred, target) [tensor(1.), tensor(1.), tensor(0.2500), tensor(0.2500), tensor(nan)]
-
compute()[source] Compute the average precision score
ConfusionMatrix¶
-
class
pytorch_lightning.metrics.classification.ConfusionMatrix(num_classes, normalize=None, threshold=0.5, compute_on_step=True, dist_sync_on_step=False, process_group=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes the confusion matrix. Works with binary, multiclass, and multilabel data. Accepts logits from a model output or integer class values in prediction. Works with multi-dimensional preds and target.
Note
This metric produces a multi-dimensional output, so it can not be directly logged.
Forward accepts
preds(float or long tensor):(N, ...)or(N, C, ...)where C is the number of classestarget(long tensor):(N, ...)
If preds and target are the same shape and preds is a float tensor, we use the
self.thresholdargument. This is the case for binary and multi-label logits.If preds has an extra dimension as in the case of multi-class scores we perform an argmax on
dim=1.- Parameters
Normalization mode for confusion matrix. Choose from
None: no normalization (default)'true': normalization over the targets (most commonly used)'pred': normalization over the predictions'all': normalization over the whole matrix
threshold¶ (
float) – Threshold value for binary or multi-label logits. default: 0.5compute_on_step¶ (
bool) – Forward only callsupdate()and return None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)
Example
>>> from pytorch_lightning.metrics import ConfusionMatrix >>> target = torch.tensor([1, 1, 0, 0]) >>> preds = torch.tensor([0, 1, 0, 0]) >>> confmat = ConfusionMatrix(num_classes=2) >>> confmat(preds, target) tensor([[2., 0.], [1., 1.]])
F1¶
-
class
pytorch_lightning.metrics.classification.F1(num_classes, threshold=0.5, average='micro', multilabel=False, compute_on_step=True, dist_sync_on_step=False, process_group=None)[source] Bases:
pytorch_lightning.metrics.classification.f_beta.FBetaComputes F1 metric. F1 metrics correspond to a harmonic mean of the precision and recall scores.
Works with binary, multiclass, and multilabel data. Accepts logits from a model output or integer class values in prediction. Works with multi-dimensional preds and target.
Forward accepts
preds(float or long tensor):(N, ...)or(N, C, ...)where C is the number of classestarget(long tensor):(N, ...)
If preds and target are the same shape and preds is a float tensor, we use the
self.thresholdargument. This is the case for binary and multi-label logits.If preds has an extra dimension as in the case of multi-class scores we perform an argmax on
dim=1.- Parameters
threshold¶ (
float) – Threshold value for binary or multi-label logits. default: 0.5'micro'computes metric globally'macro'computes metric for each class and uniformly averages them'weighted'computes metric for each class and does a weighted-average, where each class is weighted by their support (accounts for class imbalance)'none'computes and returns the metric per class
multilabel¶ (
bool) – If predictions are from multilabel classification.compute_on_step¶ (
bool) – Forward only callsupdate()and returns None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)
Example
>>> from pytorch_lightning.metrics import F1 >>> target = torch.tensor([0, 1, 2, 0, 1, 2]) >>> preds = torch.tensor([0, 2, 1, 0, 0, 1]) >>> f1 = F1(num_classes=3) >>> f1(preds, target) tensor(0.3333)
FBeta¶
-
class
pytorch_lightning.metrics.classification.FBeta(num_classes, beta=1.0, threshold=0.5, average='micro', multilabel=False, compute_on_step=True, dist_sync_on_step=False, process_group=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes F-score, specifically:

Where
 is some positive real factor. Works with binary, multiclass, and multilabel data.
Accepts logits from a model output or integer class values in prediction.
Works with multi-dimensional preds and target.
is some positive real factor. Works with binary, multiclass, and multilabel data.
Accepts logits from a model output or integer class values in prediction.
Works with multi-dimensional preds and target.Forward accepts
preds(float or long tensor):(N, ...)or(N, C, ...)where C is the number of classestarget(long tensor):(N, ...)
If preds and target are the same shape and preds is a float tensor, we use the
self.thresholdargument. This is the case for binary and multi-label logits.If preds has an extra dimension as in the case of multi-class scores we perform an argmax on
dim=1.- Parameters
threshold¶ (
float) – Threshold value for binary or multi-label logits. default: 0.5'micro'computes metric globally'macro'computes metric for each class and uniformly averages them'weighted'computes metric for each class and does a weighted-average, where each class is weighted by their support (accounts for class imbalance)'none'computes and returns the metric per class
multilabel¶ (
bool) – If predictions are from multilabel classification.compute_on_step¶ (
bool) – Forward only callsupdate()and return None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)
Example
>>> from pytorch_lightning.metrics import FBeta >>> target = torch.tensor([0, 1, 2, 0, 1, 2]) >>> preds = torch.tensor([0, 2, 1, 0, 0, 1]) >>> f_beta = FBeta(num_classes=3, beta=0.5) >>> f_beta(preds, target) tensor(0.3333)
Precision¶
-
class
pytorch_lightning.metrics.classification.Precision(num_classes=1, threshold=0.5, average='micro', multilabel=False, compute_on_step=True, dist_sync_on_step=False, process_group=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes Precision:

Where
 and
and  represent the number of true positives and
false positives respecitively. Works with binary, multiclass, and
multilabel data. Accepts logits from a model output or integer class
values in prediction. Works with multi-dimensional preds and target.
represent the number of true positives and
false positives respecitively. Works with binary, multiclass, and
multilabel data. Accepts logits from a model output or integer class
values in prediction. Works with multi-dimensional preds and target.Forward accepts
preds(float or long tensor):(N, ...)or(N, C, ...)where C is the number of classestarget(long tensor):(N, ...)
If preds and target are the same shape and preds is a float tensor, we use the
self.thresholdargument. This is the case for binary and multi-label logits.If preds has an extra dimension as in the case of multi-class scores we perform an argmax on
dim=1.- Parameters
threshold¶ (
float) – Threshold value for binary or multi-label logits. default: 0.5‘micro’ computes metric globally
’macro’ computes metric for each class and then takes the mean
multilabel¶ (
bool) – If predictions are from multilabel classification.compute_on_step¶ (
bool) – Forward only callsupdate()and return None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)
Example
>>> from pytorch_lightning.metrics import Precision >>> target = torch.tensor([0, 1, 2, 0, 1, 2]) >>> preds = torch.tensor([0, 2, 1, 0, 0, 1]) >>> precision = Precision(num_classes=3) >>> precision(preds, target) tensor(0.3333)
-
compute()[source] Override this method to compute the final metric value from state variables synchronized across the distributed backend.
-
update(preds, target)[source] Override this method to update the state variables of your metric class.
PrecisionRecallCurve¶
-
class
pytorch_lightning.metrics.classification.PrecisionRecallCurve(num_classes=None, pos_label=None, compute_on_step=True, dist_sync_on_step=False, process_group=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes precision-recall pairs for different thresholds. Works for both binary and multiclass problems. In the case of multiclass, the values will be calculated based on a one-vs-the-rest approach.
Forward accepts
preds(float tensor):(N, ...)(binary) or(N, C, ...)(multiclass) where C is the number of classestarget(long tensor):(N, ...)
- Parameters
num_classes¶ (
Optional[int]) – integer with number of classes. Not nessesary to provide for binary problems.pos_label¶ (
Optional[int]) – integer determining the positive class. Default isNonewhich for binary problem is translate to 1. For multiclass problems this argument should not be set as we iteratively change it in the range [0,num_classes-1]compute_on_step¶ (
bool) – Forward only callsupdate()and return None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)
Example (binary case):
>>> pred = torch.tensor([0, 1, 2, 3]) >>> target = torch.tensor([0, 1, 1, 0]) >>> pr_curve = PrecisionRecallCurve(pos_label=1) >>> precision, recall, thresholds = pr_curve(pred, target) >>> precision tensor([0.6667, 0.5000, 0.0000, 1.0000]) >>> recall tensor([1.0000, 0.5000, 0.0000, 0.0000]) >>> thresholds tensor([1, 2, 3])
Example (multiclass case):
>>> pred = torch.tensor([[0.75, 0.05, 0.05, 0.05, 0.05], ... [0.05, 0.75, 0.05, 0.05, 0.05], ... [0.05, 0.05, 0.75, 0.05, 0.05], ... [0.05, 0.05, 0.05, 0.75, 0.05]]) >>> target = torch.tensor([0, 1, 3, 2]) >>> pr_curve = PrecisionRecallCurve(num_classes=5) >>> precision, recall, thresholds = pr_curve(pred, target) >>> precision [tensor([1., 1.]), tensor([1., 1.]), tensor([0.2500, 0.0000, 1.0000]), tensor([0.2500, 0.0000, 1.0000]), tensor([0., 1.])] >>> recall [tensor([1., 0.]), tensor([1., 0.]), tensor([1., 0., 0.]), tensor([1., 0., 0.]), tensor([nan, 0.])] >>> thresholds [tensor([0.7500]), tensor([0.7500]), tensor([0.0500, 0.7500]), tensor([0.0500, 0.7500]), tensor([0.0500])]
-
compute()[source] Compute the precision-recall curve
Returns: 3-element tuple containing
- precision:
tensor where element i is the precision of predictions with score >= thresholds[i] and the last element is 1. If multiclass, this is a list of such tensors, one for each class.
- recall:
tensor where element i is the recall of predictions with score >= thresholds[i] and the last element is 0. If multiclass, this is a list of such tensors, one for each class.
- thresholds:
Thresholds used for computing precision/recall scores
Recall¶
-
class
pytorch_lightning.metrics.classification.Recall(num_classes=1, threshold=0.5, average='micro', multilabel=False, compute_on_step=True, dist_sync_on_step=False, process_group=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes Recall:

Where
and  represent the number of true positives and
false negatives respecitively. Works with binary, multiclass, and
multilabel data. Accepts logits from a model output or integer class
values in prediction. Works with multi-dimensional preds and target.
represent the number of true positives and
false negatives respecitively. Works with binary, multiclass, and
multilabel data. Accepts logits from a model output or integer class
values in prediction. Works with multi-dimensional preds and target.Forward accepts
preds(float or long tensor):(N, ...)or(N, C, ...)where C is the number of classestarget(long tensor):(N, ...)
If preds and target are the same shape and preds is a float tensor, we use the
self.thresholdargument. This is the case for binary and multi-label logits.If preds has an extra dimension as in the case of multi-class scores we perform an argmax on
dim=1.- Parameters
threshold¶ (
float) – Threshold value for binary or multi-label logits. default: 0.5‘micro’ computes metric globally
’macro’ computes metric for each class and then takes the mean
multilabel¶ (
bool) – If predictions are from multilabel classification.compute_on_step¶ (
bool) – Forward only callsupdate()and return None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)
Example
>>> from pytorch_lightning.metrics import Recall >>> target = torch.tensor([0, 1, 2, 0, 1, 2]) >>> preds = torch.tensor([0, 2, 1, 0, 0, 1]) >>> recall = Recall(num_classes=3) >>> recall(preds, target) tensor(0.3333)
-
compute()[source] Computes recall over state.
ROC¶
-
class
pytorch_lightning.metrics.classification.ROC(num_classes=None, pos_label=None, compute_on_step=True, dist_sync_on_step=False, process_group=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes the Receiver Operating Characteristic (ROC). Works for both binary and multiclass problems. In the case of multiclass, the values will be calculated based on a one-vs-the-rest approach.
Forward accepts
preds(float tensor):(N, ...)(binary) or(N, C, ...)(multiclass) where C is the number of classestarget(long tensor):(N, ...)
- Parameters
num_classes¶ (
Optional[int]) – integer with number of classes. Not nessesary to provide for binary problems.pos_label¶ (
Optional[int]) – integer determining the positive class. Default isNonewhich for binary problem is translate to 1. For multiclass problems this argument should not be set as we iteratively change it in the range [0,num_classes-1]compute_on_step¶ (
bool) – Forward only callsupdate()and return None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)
Example (binary case):
>>> pred = torch.tensor([0, 1, 2, 3]) >>> target = torch.tensor([0, 1, 1, 1]) >>> roc = ROC(pos_label=1) >>> fpr, tpr, thresholds = roc(pred, target) >>> fpr tensor([0., 0., 0., 0., 1.]) >>> tpr tensor([0.0000, 0.3333, 0.6667, 1.0000, 1.0000]) >>> thresholds tensor([4, 3, 2, 1, 0])
Example (multiclass case):
>>> pred = torch.tensor([[0.75, 0.05, 0.05, 0.05], ... [0.05, 0.75, 0.05, 0.05], ... [0.05, 0.05, 0.75, 0.05], ... [0.05, 0.05, 0.05, 0.75]]) >>> target = torch.tensor([0, 1, 3, 2]) >>> roc = ROC(num_classes=4) >>> fpr, tpr, thresholds = roc(pred, target) >>> fpr [tensor([0., 0., 1.]), tensor([0., 0., 1.]), tensor([0.0000, 0.3333, 1.0000]), tensor([0.0000, 0.3333, 1.0000])] >>> tpr [tensor([0., 1., 1.]), tensor([0., 1., 1.]), tensor([0., 0., 1.]), tensor([0., 0., 1.])] >>> thresholds [tensor([1.7500, 0.7500, 0.0500]), tensor([1.7500, 0.7500, 0.0500]), tensor([1.7500, 0.7500, 0.0500]), tensor([1.7500, 0.7500, 0.0500])]
-
compute()[source] Compute the receiver operating characteristic
Returns: 3-element tuple containing
- fpr:
tensor with false positive rates. If multiclass, this is a list of such tensors, one for each class.
- tpr:
tensor with true positive rates. If multiclass, this is a list of such tensors, one for each class.
- thresholds:
thresholds used for computing false- and true postive rates
Functional Metrics (Classification)¶
accuracy [func]¶
-
pytorch_lightning.metrics.functional.classification.accuracy(pred, target, num_classes=None, class_reduction='micro', return_state=False)[source] Computes the accuracy classification score
- Parameters
method to reduce metric score over labels
'micro': calculate metrics globally (default)'macro': calculate metrics for each label, and find their unweighted mean.'weighted': calculate metrics for each label, and find their weighted mean.'none': returns calculated metric per class
return_state¶ (
bool) – returns a internal state that can be ddp reduced before doing the final calculation
- Return type
- Returns
A Tensor with the accuracy score.
Example
>>> x = torch.tensor([0, 1, 2, 3]) >>> y = torch.tensor([0, 1, 2, 2]) >>> accuracy(x, y) tensor(0.7500)
auc [func]¶
-
pytorch_lightning.metrics.functional.classification.auc(x, y)[source] Computes Area Under the Curve (AUC) using the trapezoidal rule
- Parameters
- Return type
- Returns
Tensor containing AUC score (float)
Example
>>> x = torch.tensor([0, 1, 2, 3]) >>> y = torch.tensor([0, 1, 2, 2]) >>> auc(x, y) tensor(4.)
auroc [func]¶
-
pytorch_lightning.metrics.functional.classification.auroc(pred, target, sample_weight=None, pos_label=1.0)[source] Compute Area Under the Receiver Operating Characteristic Curve (ROC AUC) from prediction scores
- Parameters
- Return type
- Returns
Tensor containing ROCAUC score
Example
>>> x = torch.tensor([0, 1, 2, 3]) >>> y = torch.tensor([0, 1, 1, 0]) >>> auroc(x, y) tensor(0.5000)
multiclass_auroc [func]¶
-
pytorch_lightning.metrics.functional.classification.multiclass_auroc(pred, target, sample_weight=None, num_classes=None)[source] Compute Area Under the Receiver Operating Characteristic Curve (ROC AUC) from multiclass prediction scores
- Parameters
- Return type
- Returns
Tensor containing ROCAUC score
Example
>>> pred = torch.tensor([[0.85, 0.05, 0.05, 0.05], ... [0.05, 0.85, 0.05, 0.05], ... [0.05, 0.05, 0.85, 0.05], ... [0.05, 0.05, 0.05, 0.85]]) >>> target = torch.tensor([0, 1, 3, 2]) >>> multiclass_auroc(pred, target, num_classes=4) tensor(0.6667)
average_precision [func]¶
-
pytorch_lightning.metrics.functional.average_precision(preds, target, num_classes=None, pos_label=None, sample_weights=None)[source] Computes the average precision score.
- Parameters
num_classes¶ (
Optional[int]) – integer with number of classes. Not nessesary to provide for binary problems.pos_label¶ (
Optional[int]) – integer determining the positive class. Default isNonewhich for binary problem is translate to 1. For multiclass problems this argument should not be set as we iteratively change it in the range [0,num_classes-1]sample_weight¶ – sample weights for each data point
- Return type
- Returns
tensor with average precision. If multiclass will return list of such tensors, one for each class
Example (binary case):
>>> pred = torch.tensor([0, 1, 2, 3]) >>> target = torch.tensor([0, 1, 1, 1]) >>> average_precision(pred, target, pos_label=1) tensor(1.)
Example (multiclass case):
>>> pred = torch.tensor([[0.75, 0.05, 0.05, 0.05, 0.05], ... [0.05, 0.75, 0.05, 0.05, 0.05], ... [0.05, 0.05, 0.75, 0.05, 0.05], ... [0.05, 0.05, 0.05, 0.75, 0.05]]) >>> target = torch.tensor([0, 1, 3, 2]) >>> average_precision(pred, target, num_classes=5) [tensor(1.), tensor(1.), tensor(0.2500), tensor(0.2500), tensor(nan)]
confusion_matrix [func]¶
-
pytorch_lightning.metrics.functional.confusion_matrix(preds, target, num_classes, normalize=None, threshold=0.5)[source] Computes the confusion matrix. Works with binary, multiclass, and multilabel data. Accepts logits from a model output or integer class values in prediction. Works with multi-dimensional preds and target.
If preds and target are the same shape and preds is a float tensor, we use the
self.thresholdargument. This is the case for binary and multi-label logits.If preds has an extra dimension as in the case of multi-class scores we perform an argmax on
dim=1.- Parameters
preds¶ (
Tensor) – (float or long tensor), Either a(N, ...)tensor with labels or(N, C, ...)where C is the number of classes, tensor with logits/probabilitiestarget¶ (
Tensor) –target(long tensor), tensor with shape(N, ...)with ground true labelsNormalization mode for confusion matrix. Choose from
None: no normalization (default)'true': normalization over the targets (most commonly used)'pred': normalization over the predictions'all': normalization over the whole matrix
threshold¶ (
float) – Threshold value for binary or multi-label logits. default: 0.5
Example
>>> from pytorch_lightning.metrics.functional import confusion_matrix >>> target = torch.tensor([1, 1, 0, 0]) >>> preds = torch.tensor([0, 1, 0, 0]) >>> confusion_matrix(preds, target, num_classes=2) tensor([[2., 0.], [1., 1.]])
- Return type
dice_score [func]¶
-
pytorch_lightning.metrics.functional.classification.dice_score(pred, target, bg=False, nan_score=0.0, no_fg_score=0.0, reduction='elementwise_mean')[source] Compute dice score from prediction scores
- Parameters
bg¶ (
bool) – whether to also compute dice for the backgroundnan_score¶ (
float) – score to return, if a NaN occurs during computationno_fg_score¶ (
float) – score to return, if no foreground pixel was found in targeta method to reduce metric score over labels.
'elementwise_mean': takes the mean (default)'sum': takes the sum'none': no reduction will be applied
- Return type
- Returns
Tensor containing dice score
Example
>>> pred = torch.tensor([[0.85, 0.05, 0.05, 0.05], ... [0.05, 0.85, 0.05, 0.05], ... [0.05, 0.05, 0.85, 0.05], ... [0.05, 0.05, 0.05, 0.85]]) >>> target = torch.tensor([0, 1, 3, 2]) >>> dice_score(pred, target) tensor(0.3333)
f1 [func]¶
-
pytorch_lightning.metrics.functional.f1(preds, target, num_classes, threshold=0.5, average='micro', multilabel=False)[source] Computes F1 metric. F1 metrics correspond to a equally weighted average of the precision and recall scores.
Works with binary, multiclass, and multilabel data. Accepts logits from a model output or integer class values in prediction. Works with multi-dimensional preds and target.
If preds and target are the same shape and preds is a float tensor, we use the
self.thresholdargument. This is the case for binary and multi-label logits.If preds has an extra dimension as in the case of multi-class scores we perform an argmax on
dim=1.- Parameters
pred¶ – estimated probabilities
threshold¶ (
float) – Threshold value for binary or multi-label logits. default: 0.5'micro'computes metric globally'macro'computes metric for each class and uniformly averages them'weighted'computes metric for each class and does a weighted-average, where each class is weighted by their support (accounts for class imbalance)'none'computes and returns the metric per class
multilabel¶ (
bool) – If predictions are from multilabel classification.
Example
>>> from pytorch_lightning.metrics.functional import f1 >>> target = torch.tensor([0, 1, 2, 0, 1, 2]) >>> preds = torch.tensor([0, 2, 1, 0, 0, 1]) >>> f1(preds, target, num_classes=3) tensor(0.3333)
- Return type
fbeta [func]¶
-
pytorch_lightning.metrics.functional.fbeta(preds, target, num_classes, beta=1.0, threshold=0.5, average='micro', multilabel=False)[source] Computes f_beta metric.
Works with binary, multiclass, and multilabel data. Accepts logits from a model output or integer class values in prediction. Works with multi-dimensional preds and target.
If preds and target are the same shape and preds is a float tensor, we use the
self.thresholdargument. This is the case for binary and multi-label logits.If preds has an extra dimension as in the case of multi-class scores we perform an argmax on
dim=1.- Parameters
pred¶ – estimated probabilities
threshold¶ (
float) – Threshold value for binary or multi-label logits. default: 0.5'micro'computes metric globally'macro'computes metric for each class and uniformly averages them'weighted'computes metric for each class and does a weighted-average, where each class is weighted by their support (accounts for class imbalance)'none'computes and returns the metric per class
multilabel¶ (
bool) – If predictions are from multilabel classification.
Example
>>> from pytorch_lightning.metrics.functional import fbeta >>> target = torch.tensor([0, 1, 2, 0, 1, 2]) >>> preds = torch.tensor([0, 2, 1, 0, 0, 1]) >>> fbeta(preds, target, num_classes=3, beta=0.5) tensor(0.3333)
- Return type
iou [func]¶
-
pytorch_lightning.metrics.functional.classification.iou(pred, target, ignore_index=None, absent_score=0.0, num_classes=None, reduction='elementwise_mean')[source] Intersection over union, or Jaccard index calculation.
- Parameters
pred¶ (
Tensor) – Tensor containing integer predictions, with shape [N, d1, d2, …]target¶ (
Tensor) – Tensor containing integer targets, with shape [N, d1, d2, …]ignore_index¶ (
Optional[int]) – optional int specifying a target class to ignore. If given, this class index does not contribute to the returned score, regardless of reduction method. Has no effect if given an int that is not in the range [0, num_classes-1], where num_classes is either given or derived from pred and target. By default, no index is ignored, and all classes are used.absent_score¶ (
float) – score to use for an individual class, if no instances of the class index were present in pred AND no instances of the class index were present in target. For example, if we have 3 classes, [0, 0] for pred, and [0, 2] for target, then class 1 would be assigned the absent_score. Default is 0.0.num_classes¶ (
Optional[int]) – Optionally specify the number of classesa method to reduce metric score over labels.
'elementwise_mean': takes the mean (default)'sum': takes the sum'none': no reduction will be applied
- Returns
Tensor containing single value if reduction is ‘elementwise_mean’, or number of classes if reduction is ‘none’
- Return type
IoU score
Example
>>> target = torch.randint(0, 2, (10, 25, 25)) >>> pred = torch.tensor(target) >>> pred[2:5, 7:13, 9:15] = 1 - pred[2:5, 7:13, 9:15] >>> iou(pred, target) tensor(0.9660)
roc [func]¶
-
pytorch_lightning.metrics.functional.roc(preds, target, num_classes=None, pos_label=None, sample_weights=None)[source] Computes the Receiver Operating Characteristic (ROC).
- Parameters
num_classes¶ (
Optional[int]) – integer with number of classes. Not nessesary to provide for binary problems.pos_label¶ (
Optional[int]) – integer determining the positive class. Default isNonewhich for binary problem is translate to 1. For multiclass problems this argument should not be set as we iteratively change it in the range [0,num_classes-1]sample_weight¶ – sample weights for each data point
Returns: 3-element tuple containing
- fpr:
tensor with false positive rates. If multiclass, this is a list of such tensors, one for each class.
- tpr:
tensor with true positive rates. If multiclass, this is a list of such tensors, one for each class.
- thresholds:
thresholds used for computing false- and true postive rates
Example (binary case):
>>> pred = torch.tensor([0, 1, 2, 3]) >>> target = torch.tensor([0, 1, 1, 1]) >>> fpr, tpr, thresholds = roc(pred, target, pos_label=1) >>> fpr tensor([0., 0., 0., 0., 1.]) >>> tpr tensor([0.0000, 0.3333, 0.6667, 1.0000, 1.0000]) >>> thresholds tensor([4, 3, 2, 1, 0])
Example (multiclass case):
>>> pred = torch.tensor([[0.75, 0.05, 0.05, 0.05], ... [0.05, 0.75, 0.05, 0.05], ... [0.05, 0.05, 0.75, 0.05], ... [0.05, 0.05, 0.05, 0.75]]) >>> target = torch.tensor([0, 1, 3, 2]) >>> fpr, tpr, thresholds = roc(pred, target, num_classes=4) >>> fpr [tensor([0., 0., 1.]), tensor([0., 0., 1.]), tensor([0.0000, 0.3333, 1.0000]), tensor([0.0000, 0.3333, 1.0000])] >>> tpr [tensor([0., 1., 1.]), tensor([0., 1., 1.]), tensor([0., 0., 1.]), tensor([0., 0., 1.])] >>> thresholds [tensor([1.7500, 0.7500, 0.0500]), tensor([1.7500, 0.7500, 0.0500]), tensor([1.7500, 0.7500, 0.0500]), tensor([1.7500, 0.7500, 0.0500])]
precision [func]¶
-
pytorch_lightning.metrics.functional.classification.precision(pred, target, num_classes=None, class_reduction='micro')[source] Computes precision score.
- Parameters
method to reduce metric score over labels
'micro': calculate metrics globally (default)'macro': calculate metrics for each label, and find their unweighted mean.'weighted': calculate metrics for each label, and find their weighted mean.'none': returns calculated metric per class
- Return type
- Returns
Tensor with precision.
Example
>>> x = torch.tensor([0, 1, 2, 3]) >>> y = torch.tensor([0, 1, 2, 2]) >>> precision(x, y) tensor(0.7500)
precision_recall [func]¶
-
pytorch_lightning.metrics.functional.classification.precision_recall(pred, target, num_classes=None, class_reduction='micro', return_support=False, return_state=False)[source] Computes precision and recall for different thresholds
- Parameters
method to reduce metric score over labels
'micro': calculate metrics globally (default)'macro': calculate metrics for each label, and find their unweighted mean.'weighted': calculate metrics for each label, and find their weighted mean.'none': returns calculated metric per class
return_support¶ (
bool) – returns the support for each class, need for fbeta/f1 calculationsreturn_state¶ (
bool) – returns a internal state that can be ddp reduced before doing the final calculation
- Return type
- Returns
Tensor with precision and recall
Example
>>> x = torch.tensor([0, 1, 2, 3]) >>> y = torch.tensor([0, 2, 2, 2]) >>> precision_recall(x, y, class_reduction='macro') (tensor(0.5000), tensor(0.3333))
precision_recall_curve [func]¶
-
pytorch_lightning.metrics.functional.precision_recall_curve(preds, target, num_classes=None, pos_label=None, sample_weights=None)[source] Computes precision-recall pairs for different thresholds.
- Parameters
num_classes¶ (
Optional[int]) – integer with number of classes. Not nessesary to provide for binary problems.pos_label¶ (
Optional[int]) – integer determining the positive class. Default isNonewhich for binary problem is translate to 1. For multiclass problems this argument should not be set as we iteratively change it in the range [0,num_classes-1]sample_weight¶ – sample weights for each data point
Returns: 3-element tuple containing
- precision:
tensor where element i is the precision of predictions with score >= thresholds[i] and the last element is 1. If multiclass, this is a list of such tensors, one for each class.
- recall:
tensor where element i is the recall of predictions with score >= thresholds[i] and the last element is 0. If multiclass, this is a list of such tensors, one for each class.
- thresholds:
Thresholds used for computing precision/recall scores
Example (binary case):
>>> pred = torch.tensor([0, 1, 2, 3]) >>> target = torch.tensor([0, 1, 1, 0]) >>> precision, recall, thresholds = precision_recall_curve(pred, target, pos_label=1) >>> precision tensor([0.6667, 0.5000, 0.0000, 1.0000]) >>> recall tensor([1.0000, 0.5000, 0.0000, 0.0000]) >>> thresholds tensor([1, 2, 3])
Example (multiclass case):
>>> pred = torch.tensor([[0.75, 0.05, 0.05, 0.05, 0.05], ... [0.05, 0.75, 0.05, 0.05, 0.05], ... [0.05, 0.05, 0.75, 0.05, 0.05], ... [0.05, 0.05, 0.05, 0.75, 0.05]]) >>> target = torch.tensor([0, 1, 3, 2]) >>> precision, recall, thresholds = precision_recall_curve(pred, target, num_classes=5) >>> precision [tensor([1., 1.]), tensor([1., 1.]), tensor([0.2500, 0.0000, 1.0000]), tensor([0.2500, 0.0000, 1.0000]), tensor([0., 1.])] >>> recall [tensor([1., 0.]), tensor([1., 0.]), tensor([1., 0., 0.]), tensor([1., 0., 0.]), tensor([nan, 0.])] >>> thresholds [tensor([0.7500]), tensor([0.7500]), tensor([0.0500, 0.7500]), tensor([0.0500, 0.7500]), tensor([0.0500])]
recall [func]¶
-
pytorch_lightning.metrics.functional.classification.recall(pred, target, num_classes=None, class_reduction='micro')[source] Computes recall score.
- Parameters
method to reduce metric score over labels
'micro': calculate metrics globally (default)'macro': calculate metrics for each label, and find their unweighted mean.'weighted': calculate metrics for each label, and find their weighted mean.'none': returns calculated metric per class
- Return type
- Returns
Tensor with recall.
Example
>>> x = torch.tensor([0, 1, 2, 3]) >>> y = torch.tensor([0, 1, 2, 2]) >>> recall(x, y) tensor(0.7500)
select_topk [func]¶
-
pytorch_lightning.metrics.utils.select_topk(prob_tensor, topk=1, dim=1)[source] Convert a probability tensor to binary by selecting top-k highest entries.
- Parameters
- Output:
A binary tensor of the same shape as the input tensor of type torch.int32
Example
>>> x = torch.tensor([[1.1, 2.0, 3.0], [2.0, 1.0, 0.5]]) >>> select_topk(x, topk=2) tensor([[0, 1, 1], [1, 1, 0]], dtype=torch.int32)
- Return type
stat_scores [func]¶
-
pytorch_lightning.metrics.functional.classification.stat_scores(pred, target, class_index, argmax_dim=1)[source] Calculates the number of true positive, false positive, true negative and false negative for a specific class
- Parameters
- Return type
- Returns
True Positive, False Positive, True Negative, False Negative, Support
Example
>>> x = torch.tensor([1, 2, 3]) >>> y = torch.tensor([0, 2, 3]) >>> tp, fp, tn, fn, sup = stat_scores(x, y, class_index=1) >>> tp, fp, tn, fn, sup (tensor(0), tensor(1), tensor(2), tensor(0), tensor(0))
stat_scores_multiple_classes [func]¶
-
pytorch_lightning.metrics.functional.classification.stat_scores_multiple_classes(pred, target, num_classes=None, argmax_dim=1, reduction='none')[source] Calculates the number of true positive, false positive, true negative and false negative for each class
- Parameters
- Return type
- Returns
True Positive, False Positive, True Negative, False Negative, Support
Example
>>> x = torch.tensor([1, 2, 3]) >>> y = torch.tensor([0, 2, 3]) >>> tps, fps, tns, fns, sups = stat_scores_multiple_classes(x, y) >>> tps tensor([0., 0., 1., 1.]) >>> fps tensor([0., 1., 0., 0.]) >>> tns tensor([2., 2., 2., 2.]) >>> fns tensor([1., 0., 0., 0.]) >>> sups tensor([1., 0., 1., 1.])
to_categorical [func]¶
-
pytorch_lightning.metrics.utils.to_categorical(tensor, argmax_dim=1)[source] Converts a tensor of probabilities to a dense label tensor
- Parameters
- Return type
- Returns
A tensor with categorical labels [N, d2, …]
Example
>>> x = torch.tensor([[0.2, 0.5], [0.9, 0.1]]) >>> to_categorical(x) tensor([1, 0])
to_onehot [func]¶
-
pytorch_lightning.metrics.utils.to_onehot(label_tensor, num_classes=None)[source] Converts a dense label tensor to one-hot format
- Parameters
- Output:
A sparse label tensor with shape [N, C, d1, d2, …]
Example
>>> x = torch.tensor([1, 2, 3]) >>> to_onehot(x) tensor([[0, 1, 0, 0], [0, 0, 1, 0], [0, 0, 0, 1]])
- Return type
Regression Metrics¶
Class Metrics (Regression)¶
ExplainedVariance¶
-
class
pytorch_lightning.metrics.regression.ExplainedVariance(multioutput='uniform_average', compute_on_step=True, dist_sync_on_step=False, process_group=None, dist_sync_fn=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes explained variance:

Where
is a tensor of target values, and is a
tensor of predictions.Forward accepts
preds(float tensor):(N,)or(N, ...)(multioutput)target(long tensor):(N,)or(N, ...)(multioutput)
In the case of multioutput, as default the variances will be uniformly averaged over the additional dimensions. Please see argument multioutput for changing this behavior.
- Parameters
Defines aggregation in the case of multiple output scores. Can be one of the following strings (default is ‘uniform_average’.):
’raw_values’ returns full set of scores
’uniform_average’ scores are uniformly averaged
’variance_weighted’ scores are weighted by their individual variances
compute_on_step¶ (
bool) – Forward only callsupdate()and return None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)
Example
>>> from pytorch_lightning.metrics import ExplainedVariance >>> target = torch.tensor([3, -0.5, 2, 7]) >>> preds = torch.tensor([2.5, 0.0, 2, 8]) >>> explained_variance = ExplainedVariance() >>> explained_variance(preds, target) tensor(0.9572)
>>> target = torch.tensor([[0.5, 1], [-1, 1], [7, -6]]) >>> preds = torch.tensor([[0, 2], [-1, 2], [8, -5]]) >>> explained_variance = ExplainedVariance(multioutput='raw_values') >>> explained_variance(preds, target) tensor([0.9677, 1.0000])
-
compute()[source] Computes explained variance over state.
MeanAbsoluteError¶
-
class
pytorch_lightning.metrics.regression.MeanAbsoluteError(compute_on_step=True, dist_sync_on_step=False, process_group=None, dist_sync_fn=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes mean absolute error (MAE):

Where
is a tensor of target values, and is a tensor of predictions.- Parameters
compute_on_step¶ (
bool) – Forward only callsupdate()and return None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)
Example
>>> from pytorch_lightning.metrics import MeanAbsoluteError >>> target = torch.tensor([3.0, -0.5, 2.0, 7.0]) >>> preds = torch.tensor([2.5, 0.0, 2.0, 8.0]) >>> mean_absolute_error = MeanAbsoluteError() >>> mean_absolute_error(preds, target) tensor(0.5000)
-
compute()[source] Computes mean absolute error over state.
MeanSquaredError¶
-
class
pytorch_lightning.metrics.regression.MeanSquaredError(compute_on_step=True, dist_sync_on_step=False, process_group=None, dist_sync_fn=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes mean squared error (MSE):

Where
is a tensor of target values, and is a tensor of predictions.- Parameters
compute_on_step¶ (
bool) – Forward only callsupdate()and return None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)
Example
>>> from pytorch_lightning.metrics import MeanSquaredError >>> target = torch.tensor([2.5, 5.0, 4.0, 8.0]) >>> preds = torch.tensor([3.0, 5.0, 2.5, 7.0]) >>> mean_squared_error = MeanSquaredError() >>> mean_squared_error(preds, target) tensor(0.8750)
-
compute()[source] Computes mean squared error over state.
MeanSquaredLogError¶
-
class
pytorch_lightning.metrics.regression.MeanSquaredLogError(compute_on_step=True, dist_sync_on_step=False, process_group=None, dist_sync_fn=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes mean squared logarithmic error (MSLE):

Where
is a tensor of target values, and is a tensor of predictions.- Parameters
compute_on_step¶ (
bool) – Forward only callsupdate()and return None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)
Example
>>> from pytorch_lightning.metrics import MeanSquaredLogError >>> target = torch.tensor([2.5, 5, 4, 8]) >>> preds = torch.tensor([3, 5, 2.5, 7]) >>> mean_squared_log_error = MeanSquaredLogError() >>> mean_squared_log_error(preds, target) tensor(0.0397)
-
compute()[source] Compute mean squared logarithmic error over state.
PSNR¶
-
class
pytorch_lightning.metrics.regression.PSNR(data_range=None, base=10.0, reduction='elementwise_mean', compute_on_step=True, dist_sync_on_step=False, process_group=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes peak signal-to-noise ratio (PSNR):

Where
 denotes the mean-squared-error function.
denotes the mean-squared-error function.- Parameters
data_range¶ (
Optional[float]) – the range of the data. If None, it is determined from the data (max - min)a method to reduce metric score over labels.
'elementwise_mean': takes the mean (default)'sum': takes the sum'none': no reduction will be applied
compute_on_step¶ (
bool) – Forward only callsupdate()and return None if this is set to False. default: Truedist_sync_on_step¶ (
bool) – Synchronize metric state across processes at eachforward()before returning the value at the step. default: Falseprocess_group¶ (
Optional[Any]) – Specify the process group on which synchronization is called. default: None (which selects the entire world)
Example
>>> from pytorch_lightning.metrics import PSNR >>> psnr = PSNR() >>> preds = torch.tensor([[0.0, 1.0], [2.0, 3.0]]) >>> target = torch.tensor([[3.0, 2.0], [1.0, 0.0]]) >>> psnr(preds, target) tensor(2.5527)
-
compute()[source] Compute peak signal-to-noise ratio over state.
SSIM¶
-
class
pytorch_lightning.metrics.regression.SSIM(kernel_size=(11, 11), sigma=(1.5, 1.5), reduction='elementwise_mean', data_range=None, k1=0.01, k2=0.03, compute_on_step=True, dist_sync_on_step=False, process_group=None)[source] Bases:
pytorch_lightning.metrics.metric.MetricComputes Structual Similarity Index Measure (SSIM).
- Parameters
kernel_size¶ (
Sequence[int]) – size of the gaussian kernel (default: (11, 11))sigma¶ (
Sequence[float]) – Standard deviation of the gaussian kernel (default: (1.5, 1.5))a method to reduce metric score over labels.
'elementwise_mean': takes the mean (default)'sum': takes the sum'none': no reduction will be applied
data_range¶ (
Optional[float]) – Range of the image. IfNone, it is determined from the image (max - min)
- Returns
Tensor with SSIM score
Example
>>> from pytorch_lightning.metrics import SSIM >>> preds = torch.rand([16, 1, 16, 16]) >>> target = preds * 0.75 >>> ssim = SSIM() >>> ssim(preds, target) tensor(0.9219)
-
compute()[source] Computes explained variance over state.
Functional Metrics (Regression)¶
explained_variance [func]¶
-
pytorch_lightning.metrics.functional.explained_variance(preds, target, multioutput='uniform_average')[source] Computes explained variance.
- Parameters
pred¶ – estimated labels
Defines aggregation in the case of multiple output scores. Can be one of the following strings (default is ‘uniform_average’.):
’raw_values’ returns full set of scores
’uniform_average’ scores are uniformly averaged
’variance_weighted’ scores are weighted by their individual variances
Example
>>> from pytorch_lightning.metrics.functional import explained_variance >>> target = torch.tensor([3, -0.5, 2, 7]) >>> preds = torch.tensor([2.5, 0.0, 2, 8]) >>> explained_variance(preds, target) tensor(0.9572)
>>> target = torch.tensor([[0.5, 1], [-1, 1], [7, -6]]) >>> preds = torch.tensor([[0, 2], [-1, 2], [8, -5]]) >>> explained_variance(preds, target, multioutput='raw_values') tensor([0.9677, 1.0000])
mean_absolute_error [func]¶
-
pytorch_lightning.metrics.functional.mean_absolute_error(preds, target)[source] Computes mean absolute error
- Parameters
- Return type
- Returns
Tensor with MAE
Example
>>> x = torch.tensor([0., 1, 2, 3]) >>> y = torch.tensor([0., 1, 2, 2]) >>> mean_absolute_error(x, y) tensor(0.2500)
mean_squared_error [func]¶
-
pytorch_lightning.metrics.functional.mean_squared_error(preds, target)[source] Computes mean squared error
- Parameters
- Return type
- Returns
Tensor with MSE
Example
>>> x = torch.tensor([0., 1, 2, 3]) >>> y = torch.tensor([0., 1, 2, 2]) >>> mean_squared_error(x, y) tensor(0.2500)
mean_squared_log_error [func]¶
-
pytorch_lightning.metrics.functional.mean_squared_log_error(preds, target)[source] Computes mean squared log error
- Parameters
- Return type
- Returns
Tensor with RMSLE
Example
>>> x = torch.tensor([0., 1, 2, 3]) >>> y = torch.tensor([0., 1, 2, 2]) >>> mean_squared_log_error(x, y) tensor(0.0207)
psnr [func]¶
-
pytorch_lightning.metrics.functional.psnr(preds, target, data_range=None, base=10.0, reduction='elementwise_mean')[source] Computes the peak signal-to-noise ratio
- Parameters
data_range¶ (
Optional[float]) – the range of the data. If None, it is determined from the data (max - min)a method to reduce metric score over labels.
'elementwise_mean': takes the mean (default)'sum': takes the sum'none': no reduction will be applied
return_state¶ – returns a internal state that can be ddp reduced before doing the final calculation
- Return type
- Returns
Tensor with PSNR score
Example
>>> pred = torch.tensor([[0.0, 1.0], [2.0, 3.0]]) >>> target = torch.tensor([[3.0, 2.0], [1.0, 0.0]]) >>> psnr(pred, target) tensor(2.5527)
ssim [func]¶
-
pytorch_lightning.metrics.functional.ssim(preds, target, kernel_size=(11, 11), sigma=(1.5, 1.5), reduction='elementwise_mean', data_range=None, k1=0.01, k2=0.03)[source] Computes Structual Similarity Index Measure
- Parameters
pred¶ – estimated image
kernel_size¶ (
Sequence[int]) – size of the gaussian kernel (default: (11, 11))sigma¶ (
Sequence[float]) – Standard deviation of the gaussian kernel (default: (1.5, 1.5))a method to reduce metric score over labels.
'elementwise_mean': takes the mean (default)'sum': takes the sum'none': no reduction will be applied
data_range¶ (
Optional[float]) – Range of the image. IfNone, it is determined from the image (max - min)
- Return type
- Returns
Tensor with SSIM score
Example
>>> preds = torch.rand([16, 1, 16, 16]) >>> target = preds * 0.75 >>> ssim(preds, target) tensor(0.9219)
NLP¶
bleu_score [func]¶
-
pytorch_lightning.metrics.functional.nlp.bleu_score(translate_corpus, reference_corpus, n_gram=4, smooth=False)[source] Calculate BLEU score of machine translated text with one or more references
- Parameters
- Return type
- Returns
Tensor with BLEU Score
Example
>>> translate_corpus = ['the cat is on the mat'.split()] >>> reference_corpus = [['there is a cat on the mat'.split(), 'a cat is on the mat'.split()]] >>> bleu_score(translate_corpus, reference_corpus) tensor(0.7598)
Pairwise¶
embedding_similarity [func]¶
-
pytorch_lightning.metrics.functional.self_supervised.embedding_similarity(batch, similarity='cosine', reduction='none', zero_diagonal=True)[source] Computes representation similarity
Example
>>> embeddings = torch.tensor([[1., 2., 3., 4.], [1., 2., 3., 4.], [4., 5., 6., 7.]]) >>> embedding_similarity(embeddings) tensor([[0.0000, 1.0000, 0.9759], [1.0000, 0.0000, 0.9759], [0.9759, 0.9759, 0.0000]])
- Parameters
- Return type
- Returns
A square matrix (batch, batch) with the similarity scores between all elements If sum or mean are used, then returns (b, 1) with the reduced value for each row
Plugins¶
Plugins allow custom integrations to the internals of the Trainer such as a custom amp or ddp implementation.
For example, to customize your own DistributedDataParallel you could do something like this:
class MyDDP(DDPPlugin):
...
# use your own ddp algorithm
my_ddp = MyDDP()
trainer = Trainer(plugins=[my_ddp])
ApexPlugin¶
-
class
pytorch_lightning.plugins.apex.ApexPlugin(trainer=None)[source]¶ Bases:
pytorch_lightning.plugins.precision_plugin.PrecisionPlugin-
clip_gradients(grad_clip_val, optimizer, norm_type)[source]¶ This code is a modification of
torch.nn.utils.clip_grad_norm_()using a higher epsilon for fp16 weights. This is important when setting amp_level to O2, and the master weights are in fp16. :type _sphinx_paramlinks_pytorch_lightning.plugins.apex.ApexPlugin.clip_gradients.grad_clip_val:Union[int,float] :param _sphinx_paramlinks_pytorch_lightning.plugins.apex.ApexPlugin.clip_gradients.grad_clip_val: Maximum norm of gradients. :type _sphinx_paramlinks_pytorch_lightning.plugins.apex.ApexPlugin.clip_gradients.optimizer:Optimizer:param _sphinx_paramlinks_pytorch_lightning.plugins.apex.ApexPlugin.clip_gradients.optimizer: Optimizer with gradients that will be clipped. :type _sphinx_paramlinks_pytorch_lightning.plugins.apex.ApexPlugin.clip_gradients.norm_type:float:param _sphinx_paramlinks_pytorch_lightning.plugins.apex.ApexPlugin.clip_gradients.norm_type: (float or int): type of the used p-norm. Can be'inf'for :param infinity _sphinx_paramlinks_pytorch_lightning.plugins.apex.ApexPlugin.clip_gradients.norm.:
-
configure_apex(amp, model, optimizers, amp_level)[source]¶ Override to init AMP your own way. Must return a model and list of optimizers.
- Parameters
- Return type
Tuple[LightningModule,List[Optimizer]]- Returns
Apex wrapped model and optimizers
Examples
# Default implementation used by Trainer. def configure_apex(self, amp, model, optimizers, amp_level): model, optimizers = amp.initialize( model, optimizers, opt_level=amp_level, ) return model, optimizers
-
NativeAMPPlugin¶
DDPPlugin¶
-
class
pytorch_lightning.plugins.ddp_plugin.DDPPlugin(**kwargs)[source]¶ Bases:
pytorch_lightning.plugins.plugin.LightningPluginPlugin to link a custom ddp implementation to any arbitrary accelerator.
This plugin forwards all constructor arguments to LightningDistributedDataParallel, which in turn forwards all args to DistributedDataParallel.
Example:
class MyDDP(DDPPlugin): def configure_ddp(self, model, device_ids): model = MyDDPWrapper(model, device_ids) return model my_ddp = MyDDP() trainer = Trainer(accelerator='ddp_x', plugins=[my_ddp])
-
block_backward_sync(model)[source]¶ Blocks ddp sync gradients behaviour on backwards pass. This is useful for skipping sync when accumulating gradients, reducing communication overhead Returns: context manager with sync behaviour off
-
configure_ddp(model, device_ids)[source]¶ Pass through all customizations from constructor to LightningDistributedDataParallel. Override to define a custom DDP implementation.
Note
Only requirement is that your DDP implementation subclasses LightningDistributedDataParallel
The default implementation is:
def configure_ddp(self, model, device_ids): model = LightningDistributedDataParallel( model, device_ids=device_ids, find_unused_parameters=False ) return model
- Parameters
model¶ (
LightningModule) – the lightningModule
- Return type
LightningDistributedDataParallel- Returns
the model wrapped in LightningDistributedDataParallel
-
get_model_from_plugin(model)[source]¶ Override to modify returning base
LightningModulewhen accessing variable and functions outside of the parallel wrapper.- Example::
ref_model = ddp_plugin.get_model_from_plugin(model) ref_model.training_step(…)
- Parameters
model¶ (
Union[LightningDistributedDataParallel,LightningModule]) – Model with parallel wrapper.
Returns: Reference
LightningModulewithin parallel wrapper.- Return type
-
on_after_setup_optimizers(trainer)[source]¶ Called after optimizers have been set-up. This is useful for doing any configuration options in RPC, or state sharding.
-
on_before_forward(model, *args)[source]¶ Override to handle custom edge case.
- Parameters
args¶ – Inputs to the model.
model¶ (
LightningModule) – Model to train.
Returns: args moved to correct device if needed.
-
property
data_parallel_group¶ Return the group that this process exists in. By default, this is the world size. Useful for when additional parallel groups have been created, to select certain processes. Returns: The ProcessGroup this process exists in.
-
Step-by-step walk-through¶
This guide will walk you through the core pieces of PyTorch Lightning.
We’ll accomplish the following:
Implement an MNIST classifier.
Use inheritance to implement an AutoEncoder
Note
Any DL/ML PyTorch project fits into the Lightning structure. Here we just focus on 3 types of research to illustrate.
From MNIST to AutoEncoders¶
Installing Lightning¶
Lightning is trivial to install. We recommend using conda environments
conda activate my_env
pip install pytorch-lightning
Or without conda environments, use pip.
pip install pytorch-lightning
Or conda.
conda install pytorch-lightning -c conda-forge
The research¶
The Model¶
The LightningModule holds all the core research ingredients:
The model
The optimizers
The train/ val/ test steps
Let’s first start with the model. In this case, we’ll design a 3-layer neural network.
import torch
from torch.nn import functional as F
from torch import nn
from pytorch_lightning.core.lightning import LightningModule
class LitMNIST(LightningModule):
def __init__(self):
super().__init__()
# mnist images are (1, 28, 28) (channels, width, height)
self.layer_1 = torch.nn.Linear(28 * 28, 128)
self.layer_2 = torch.nn.Linear(128, 256)
self.layer_3 = torch.nn.Linear(256, 10)
def forward(self, x):
batch_size, channels, width, height = x.size()
# (b, 1, 28, 28) -> (b, 1*28*28)
x = x.view(batch_size, -1)
x = self.layer_1(x)
x = F.relu(x)
x = self.layer_2(x)
x = F.relu(x)
x = self.layer_3(x)
x = F.log_softmax(x, dim=1)
return x
Notice this is a LightningModule instead of a torch.nn.Module. A LightningModule is
equivalent to a pure PyTorch Module except it has added functionality. However, you can use it EXACTLY the same as you would a PyTorch Module.
net = LitMNIST()
x = torch.randn(1, 1, 28, 28)
out = net(x)
Out:
torch.Size([1, 10])
Now we add the training_step which has all our training loop logic
class LitMNIST(LightningModule):
def training_step(self, batch, batch_idx):
x, y = batch
logits = self(x)
loss = F.nll_loss(logits, y)
return loss
Data¶
Lightning operates on pure dataloaders. Here’s the PyTorch code for loading MNIST.
from torch.utils.data import DataLoader, random_split
from torchvision.datasets import MNIST
import os
from torchvision import datasets, transforms
# transforms
# prepare transforms standard to MNIST
transform=transforms.Compose([transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))])
# data
mnist_train = MNIST(os.getcwd(), train=True, download=True, transform=transform)
mnist_train = DataLoader(mnist_train, batch_size=64)
You can use DataLoaders in 3 ways:
1. Pass DataLoaders to .fit()¶
Pass in the dataloaders to the .fit() function.
model = LitMNIST()
trainer = Trainer()
trainer.fit(model, mnist_train)
2. LightningModule DataLoaders¶
For fast research prototyping, it might be easier to link the model with the dataloaders.
class LitMNIST(pl.LightningModule):
def train_dataloader(self):
# transforms
# prepare transforms standard to MNIST
transform=transforms.Compose([transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))])
# data
mnist_train = MNIST(os.getcwd(), train=True, download=True, transform=transform)
return DataLoader(mnist_train, batch_size=64)
def val_dataloader(self):
transforms = ...
mnist_val = ...
return DataLoader(mnist_val, batch_size=64)
def test_dataloader(self):
transforms = ...
mnist_test = ...
return DataLoader(mnist_test, batch_size=64)
DataLoaders are already in the model, no need to specify on .fit().
model = LitMNIST()
trainer = Trainer()
trainer.fit(model)
3. DataModules (recommended)¶
Defining free-floating dataloaders, splits, download instructions, and such can get messy. In this case, it’s better to group the full definition of a dataset into a DataModule which includes:
Download instructions
Processing instructions
Split instructions
Train dataloader
Val dataloader(s)
Test dataloader(s)
class MyDataModule(LightningDataModule):
def __init__(self):
super().__init__()
self.train_dims = None
self.vocab_size = 0
def prepare_data(self):
# called only on 1 GPU
download_dataset()
tokenize()
build_vocab()
def setup(self):
# called on every GPU
vocab = load_vocab()
self.vocab_size = len(vocab)
self.train, self.val, self.test = load_datasets()
self.train_dims = self.train.next_batch.size()
def train_dataloader(self):
transforms = ...
return DataLoader(self.train, batch_size=64)
def val_dataloader(self):
transforms = ...
return DataLoader(self.val, batch_size=64)
def test_dataloader(self):
transforms = ...
return DataLoader(self.test, batch_size=64)
Using DataModules allows easier sharing of full dataset definitions.
# use an MNIST dataset
mnist_dm = MNISTDatamodule()
model = LitModel(num_classes=mnist_dm.num_classes)
trainer.fit(model, mnist_dm)
# or other datasets with the same model
imagenet_dm = ImagenetDatamodule()
model = LitModel(num_classes=imagenet_dm.num_classes)
trainer.fit(model, imagenet_dm)
Note
prepare_data() is called on only one GPU in distributed training (automatically)
Note
setup() is called on every GPU (automatically)
Models defined by data¶
When your models need to know about the data, it’s best to process the data before passing it to the model.
# init dm AND call the processing manually
dm = ImagenetDataModule()
dm.prepare_data()
dm.setup()
model = LitModel(out_features=dm.num_classes, img_width=dm.img_width, img_height=dm.img_height)
trainer.fit(model, dm)
use
prepare_data()to download and process the dataset.use
setup()to do splits, and build your model internals
An alternative to using a DataModule is to defer initialization of the models modules to the setup method of your LightningModule as follows:
class LitMNIST(LightningModule):
def __init__(self):
self.l1 = None
def prepare_data(self):
download_data()
tokenize()
def setup(self, step):
# step is either 'fit' or 'test' 90% of the time not relevant
data = load_data()
num_classes = data.classes
self.l1 = nn.Linear(..., num_classes)
Optimizer¶
Next we choose what optimizer to use for training our system. In PyTorch we do it as follows:
from torch.optim import Adam
optimizer = Adam(LitMNIST().parameters(), lr=1e-3)
In Lightning we do the same but organize it under the configure_optimizers() method.
class LitMNIST(LightningModule):
def configure_optimizers(self):
return Adam(self.parameters(), lr=1e-3)
Note
The LightningModule itself has the parameters, so pass in self.parameters()
However, if you have multiple optimizers use the matching parameters
class LitMNIST(LightningModule):
def configure_optimizers(self):
return Adam(self.generator(), lr=1e-3), Adam(self.discriminator(), lr=1e-3)
Training step¶
The training step is what happens inside the training loop.
for epoch in epochs:
for batch in data:
# TRAINING STEP
# ....
# TRAINING STEP
loss.backward()
optimizer.step()
optimizer.zero_grad()
In the case of MNIST, we do the following
for epoch in epochs:
for batch in data:
# ------ TRAINING STEP START ------
x, y = batch
logits = model(x)
loss = F.nll_loss(logits, y)
# ------ TRAINING STEP END ------
loss.backward()
optimizer.step()
optimizer.zero_grad()
In Lightning, everything that is in the training step gets organized under the
training_step() function in the LightningModule.
class LitMNIST(LightningModule):
def training_step(self, batch, batch_idx):
x, y = batch
logits = self(x)
loss = F.nll_loss(logits, y)
return loss
Again, this is the same PyTorch code except that it has been organized by the LightningModule. This code is not restricted which means it can be as complicated as a full seq-2-seq, RL loop, GAN, etc…
The engineering¶
Training¶
So far we defined 4 key ingredients in pure PyTorch but organized the code with the LightningModule.
Model.
Training data.
Optimizer.
What happens in the training loop.
For clarity, we’ll recall that the full LightningModule now looks like this.
class LitMNIST(LightningModule):
def __init__(self):
super().__init__()
self.layer_1 = torch.nn.Linear(28 * 28, 128)
self.layer_2 = torch.nn.Linear(128, 256)
self.layer_3 = torch.nn.Linear(256, 10)
def forward(self, x):
batch_size, channels, width, height = x.size()
x = x.view(batch_size, -1)
x = self.layer_1(x)
x = F.relu(x)
x = self.layer_2(x)
x = F.relu(x)
x = self.layer_3(x)
x = F.log_softmax(x, dim=1)
return x
def training_step(self, batch, batch_idx):
x, y = batch
logits = self(x)
loss = F.nll_loss(logits, y)
return loss
Again, this is the same PyTorch code, except that it’s organized by the LightningModule.
Logging¶
To log to Tensorboard, your favorite logger, and/or the progress bar, use the
log() method which can be called from
any method in the LightningModule.
def training_step(self, batch, batch_idx):
self.log('my_metric', x)
The log() method has a few options:
on_step (logs the metric at that step in training)
on_epoch (automatically accumulates and logs at the end of the epoch)
prog_bar (logs to the progress bar)
logger (logs to the logger like Tensorboard)
Depending on where the log is called from, Lightning auto-determines the correct mode for you. But of course you can override the default behavior by manually setting the flags.
Note
Setting on_epoch=True will accumulate your logged values over the full training epoch.
def training_step(self, batch, batch_idx):
self.log('my_loss', loss, on_step=True, on_epoch=True, prog_bar=True, logger=True)
You can also use any method of your logger directly:
def training_step(self, batch, batch_idx):
tensorboard = self.logger.experiment
tensorboard.any_summary_writer_method_you_want())
Once your training starts, you can view the logs by using your favorite logger or booting up the Tensorboard logs:
tensorboard --logdir ./lightning_logs
Which will generate automatic tensorboard logs (or with the logger of your choice).

But you can also use any of the number of other loggers we support.
Train on CPU¶
from pytorch_lightning import Trainer
model = LitMNIST()
trainer = Trainer()
trainer.fit(model, train_loader)
You should see the following weights summary and progress bar

Train on GPU¶
But the beauty is all the magic you can do with the trainer flags. For instance, to run this model on a GPU:
model = LitMNIST()
trainer = Trainer(gpus=1)
trainer.fit(model, train_loader)

Train on Multi-GPU¶
Or you can also train on multiple GPUs.
model = LitMNIST()
trainer = Trainer(gpus=8)
trainer.fit(model, train_loader)
Or multiple nodes
# (32 GPUs)
model = LitMNIST()
trainer = Trainer(gpus=8, num_nodes=4, accelerator='ddp')
trainer.fit(model, train_loader)
Refer to the distributed computing guide for more details.
Train on TPUs¶
Did you know you can use PyTorch on TPUs? It’s very hard to do, but we’ve worked with the xla team to use their awesome library to get this to work out of the box!
Let’s train on Colab (full demo available here)
First, change the runtime to TPU (and reinstall lightning).


Next, install the required xla library (adds support for PyTorch on TPUs)
!curl https://raw.githubusercontent.com/pytorch/xla/master/contrib/scripts/env-setup.py -o pytorch-xla-env-setup.py
!python pytorch-xla-env-setup.py --version nightly --apt-packages libomp5 libopenblas-dev
In distributed training (multiple GPUs and multiple TPU cores) each GPU or TPU core will run a copy of this program. This means that without taking any care you will download the dataset N times which will cause all sorts of issues.
To solve this problem, make sure your download code is in the prepare_data method in the DataModule.
In this method we do all the preparation we need to do once (instead of on every GPU).
prepare_data can be called in two ways, once per node or only on the root node
(Trainer(prepare_data_per_node=False)).
class MNISTDataModule(LightningDataModule):
def __init__(self, batch_size=64):
super().__init__()
self.batch_size = batch_size
def prepare_data(self):
# download only
MNIST(os.getcwd(), train=True, download=True, transform=transforms.ToTensor())
MNIST(os.getcwd(), train=False, download=True, transform=transforms.ToTensor())
def setup(self, stage):
# transform
transform=transforms.Compose([transforms.ToTensor()])
mnist_train = MNIST(os.getcwd(), train=True, download=False, transform=transform)
mnist_test = MNIST(os.getcwd(), train=False, download=False, transform=transform)
# train/val split
mnist_train, mnist_val = random_split(mnist_train, [55000, 5000])
# assign to use in dataloaders
self.train_dataset = mnist_train
self.val_dataset = mnist_val
self.test_dataset = mnist_test
def train_dataloader(self):
return DataLoader(self.train_dataset, batch_size=self.batch_size)
def val_dataloader(self):
return DataLoader(self.val_dataset, batch_size=self.batch_size)
def test_dataloader(self):
return DataLoader(self.test_dataset, batch_size=self.batch_size)
The prepare_data method is also a good place to do any data processing that needs to be done only
once (ie: download or tokenize, etc…).
Note
Lightning inserts the correct DistributedSampler for distributed training. No need to add yourself!
Now we can train the LightningModule on a TPU without doing anything else!
dm = MNISTDataModule()
model = LitMNIST()
trainer = Trainer(tpu_cores=8)
trainer.fit(model, dm)
You’ll now see the TPU cores booting up.

Notice the epoch is MUCH faster!

Hyperparameters¶
Lightning has utilities to interact seamlessly with the command line ArgumentParser
and plays well with the hyperparameter optimization framework of your choice.
ArgumentParser¶
Lightning is designed to augment a lot of the functionality of the built-in Python ArgumentParser
from argparse import ArgumentParser
parser = ArgumentParser()
parser.add_argument('--layer_1_dim', type=int, default=128)
args = parser.parse_args()
This allows you to call your program like so:
python trainer.py --layer_1_dim 64
Argparser Best Practices¶
It is best practice to layer your arguments in three sections.
Trainer args (
gpus,num_nodes, etc…)Model specific arguments (
layer_dim,num_layers,learning_rate, etc…)Program arguments (
data_path,cluster_email, etc…)
We can do this as follows. First, in your LightningModule, define the arguments
specific to that module. Remember that data splits or data paths may also be specific to
a module (i.e.: if your project has a model that trains on Imagenet and another on CIFAR-10).
class LitModel(LightningModule):
@staticmethod
def add_model_specific_args(parent_parser):
parser = ArgumentParser(parents=[parent_parser], add_help=False)
parser.add_argument('--encoder_layers', type=int, default=12)
parser.add_argument('--data_path', type=str, default='/some/path')
return parser
Now in your main trainer file, add the Trainer args, the program args, and add the model args
# ----------------
# trainer_main.py
# ----------------
from argparse import ArgumentParser
parser = ArgumentParser()
# add PROGRAM level args
parser.add_argument('--conda_env', type=str, default='some_name')
parser.add_argument('--notification_email', type=str, default='will@email.com')
# add model specific args
parser = LitModel.add_model_specific_args(parser)
# add all the available trainer options to argparse
# ie: now --gpus --num_nodes ... --fast_dev_run all work in the cli
parser = Trainer.add_argparse_args(parser)
args = parser.parse_args()
Now you can call run your program like so:
python trainer_main.py --gpus 2 --num_nodes 2 --conda_env 'my_env' --encoder_layers 12
Finally, make sure to start the training like so:
# init the trainer like this
trainer = Trainer.from_argparse_args(args, early_stopping_callback=...)
# NOT like this
trainer = Trainer(gpus=hparams.gpus, ...)
# init the model with Namespace directly
model = LitModel(args)
# or init the model with all the key-value pairs
dict_args = vars(args)
model = LitModel(**dict_args)
LightningModule hyperparameters¶
Often times we train many versions of a model. You might share that model or come back to it a few months later at which point it is very useful to know how that model was trained (i.e.: what learning rate, neural network, etc…).
Lightning has a few ways of saving that information for you in checkpoints and yaml files. The goal here is to improve readability and reproducibility.
The first way is to ask lightning to save the values of anything in the __init__ for you to the checkpoint. This also makes those values available via self.hparams.
class LitMNIST(LightningModule): def __init__(self, layer_1_dim=128, learning_rate=1e-2, **kwargs): super().__init__() # call this to save (layer_1_dim=128, learning_rate=1e-4) to the checkpoint self.save_hyperparameters() # equivalent self.save_hyperparameters('layer_1_dim', 'learning_rate') # Now possible to access layer_1_dim from hparams self.hparams.layer_1_dim
Sometimes your init might have objects or other parameters you might not want to save. In that case, choose only a few
class LitMNIST(LightningModule): def __init__(self, loss_fx, generator_network, layer_1_dim=128 **kwargs): super().__init__() self.layer_1_dim = layer_1_dim self.loss_fx = loss_fx # call this to save (layer_1_dim=128) to the checkpoint self.save_hyperparameters('layer_1_dim') # to load specify the other args model = LitMNIST.load_from_checkpoint(PATH, loss_fx=torch.nn.SomeOtherLoss, generator_network=MyGenerator())
Assign to self.hparams. Anything assigned to self.hparams will also be saved automatically.
# using a argparse.Namespace class LitMNIST(LightningModule): def __init__(self, hparams, *args, **kwargs): super().__init__() self.hparams = hparams self.layer_1 = torch.nn.Linear(28 * 28, self.hparams.layer_1_dim) self.layer_2 = torch.nn.Linear(self.hparams.layer_1_dim, self.hparams.layer_2_dim) self.layer_3 = torch.nn.Linear(self.hparams.layer_2_dim, 10) def train_dataloader(self): return DataLoader(mnist_train, batch_size=self.hparams.batch_size)
Warning
Deprecated since v1.1.0. This method of assigning hyperparameters to the LightningModule will no longer be supported from v1.3.0. Use the
self.save_hyperparameters()method from above instead.You can also save full objects such as dict or Namespace to the checkpoint.
# using a argparse.Namespace class LitMNIST(LightningModule): def __init__(self, conf, *args, **kwargs): super().__init__() self.save_hyperparameters(conf) self.layer_1 = torch.nn.Linear(28 * 28, self.hparams.layer_1_dim) self.layer_2 = torch.nn.Linear(self.hparams.layer_1_dim, self.hparams.layer_2_dim) self.layer_3 = torch.nn.Linear(self.hparams.layer_2_dim, 10) conf = OmegaConf.create(...) model = LitMNIST(conf) # Now possible to access any stored variables from hparams model.hparams.anything
Trainer args¶
To recap, add ALL possible trainer flags to the argparser and init the Trainer this way
parser = ArgumentParser()
parser = Trainer.add_argparse_args(parser)
hparams = parser.parse_args()
trainer = Trainer.from_argparse_args(hparams)
# or if you need to pass in callbacks
trainer = Trainer.from_argparse_args(hparams, checkpoint_callback=..., callbacks=[...])
Multiple Lightning Modules¶
We often have multiple Lightning Modules where each one has different arguments. Instead of
polluting the main.py file, the LightningModule lets you define arguments for each one.
class LitMNIST(LightningModule):
def __init__(self, layer_1_dim, **kwargs):
super().__init__()
self.layer_1 = torch.nn.Linear(28 * 28, layer_1_dim)
@staticmethod
def add_model_specific_args(parent_parser):
parser = ArgumentParser(parents=[parent_parser], add_help=False)
parser.add_argument('--layer_1_dim', type=int, default=128)
return parser
class GoodGAN(LightningModule):
def __init__(self, encoder_layers, **kwargs):
super().__init__()
self.encoder = Encoder(layers=encoder_layers)
@staticmethod
def add_model_specific_args(parent_parser):
parser = ArgumentParser(parents=[parent_parser], add_help=False)
parser.add_argument('--encoder_layers', type=int, default=12)
return parser
Now we can allow each model to inject the arguments it needs in the main.py
def main(args):
dict_args = vars(args)
# pick model
if args.model_name == 'gan':
model = GoodGAN(**dict_args)
elif args.model_name == 'mnist':
model = LitMNIST(**dict_args)
trainer = Trainer.from_argparse_args(args)
trainer.fit(model)
if __name__ == '__main__':
parser = ArgumentParser()
parser = Trainer.add_argparse_args(parser)
# figure out which model to use
parser.add_argument('--model_name', type=str, default='gan', help='gan or mnist')
# THIS LINE IS KEY TO PULL THE MODEL NAME
temp_args, _ = parser.parse_known_args()
# let the model add what it wants
if temp_args.model_name == 'gan':
parser = GoodGAN.add_model_specific_args(parser)
elif temp_args.model_name == 'mnist':
parser = LitMNIST.add_model_specific_args(parser)
args = parser.parse_args()
# train
main(args)
and now we can train MNIST or the GAN using the command line interface!
$ python main.py --model_name gan --encoder_layers 24
$ python main.py --model_name mnist --layer_1_dim 128
Validating¶
For most cases, we stop training the model when the performance on a validation split of the data reaches a minimum.
Just like the training_step, we can define a validation_step to check whatever
metrics we care about, generate samples, or add more to our logs.
def validation_step(self, batch, batch_idx):
loss = MSE_loss(...)
self.log('val_loss', loss)
Now we can train with a validation loop as well.
from pytorch_lightning import Trainer
model = LitMNIST()
trainer = Trainer(tpu_cores=8)
trainer.fit(model, train_loader, val_loader)
You may have noticed the words Validation sanity check logged. This is because Lightning runs 2 batches of validation before starting to train. This is a kind of unit test to make sure that if you have a bug in the validation loop, you won’t need to potentially wait for a full epoch to find out.
Note
Lightning disables gradients, puts model in eval mode, and does everything needed for validation.
Val loop under the hood¶
Under the hood, Lightning does the following:
model = Model()
model.train()
torch.set_grad_enabled(True)
for epoch in epochs:
for batch in data:
# ...
# train
# validate
model.eval()
torch.set_grad_enabled(False)
outputs = []
for batch in val_data:
x, y = batch # validation_step
y_hat = model(x) # validation_step
loss = loss(y_hat, x) # validation_step
outputs.append({'val_loss': loss}) # validation_step
total_loss = outputs.mean() # validation_epoch_end
Optional methods¶
If you still need even more fine-grain control, define the other optional methods for the loop.
def validation_step(self, batch, batch_idx):
preds = ...
return preds
def validation_epoch_end(self, val_step_outputs):
for pred in val_step_outputs:
# do something with all the predictions from each validation_step
Testing¶
Once our research is done and we’re about to publish or deploy a model, we normally want to figure out how it will generalize in the “real world.” For this, we use a held-out split of the data for testing.
Just like the validation loop, we define a test loop
class LitMNIST(LightningModule):
def test_step(self, batch, batch_idx):
x, y = batch
logits = self(x)
loss = F.nll_loss(logits, y)
self.log('test_loss', loss)
However, to make sure the test set isn’t used inadvertently, Lightning has a separate API to run tests.
Once you train your model simply call .test().
from pytorch_lightning import Trainer
model = LitMNIST()
trainer = Trainer(tpu_cores=8)
trainer.fit(model)
# run test set
result = trainer.test()
print(result)
Out:
--------------------------------------------------------------
TEST RESULTS
{'test_loss': 1.1703}
--------------------------------------------------------------
You can also run the test from a saved lightning model
model = LitMNIST.load_from_checkpoint(PATH)
trainer = Trainer(tpu_cores=8)
trainer.test(model)
Note
Lightning disables gradients, puts model in eval mode, and does everything needed for testing.
Warning
.test() is not stable yet on TPUs. We’re working on getting around the multiprocessing challenges.
Predicting¶
Again, a LightningModule is exactly the same as a PyTorch module. This means you can load it and use it for prediction.
model = LitMNIST.load_from_checkpoint(PATH)
x = torch.randn(1, 1, 28, 28)
out = model(x)
On the surface, it looks like forward and training_step are similar. Generally, we want to make sure that
what we want the model to do is what happens in the forward. whereas the training_step likely calls forward from
within it.
class MNISTClassifier(LightningModule):
def forward(self, x):
batch_size, channels, width, height = x.size()
x = x.view(batch_size, -1)
x = self.layer_1(x)
x = F.relu(x)
x = self.layer_2(x)
x = F.relu(x)
x = self.layer_3(x)
x = F.log_softmax(x, dim=1)
return x
def training_step(self, batch, batch_idx):
x, y = batch
logits = self(x)
loss = F.nll_loss(logits, y)
return loss
model = MNISTClassifier()
x = mnist_image()
logits = model(x)
In this case, we’ve set this LightningModel to predict logits. But we could also have it predict feature maps:
class MNISTRepresentator(LightningModule):
def forward(self, x):
batch_size, channels, width, height = x.size()
x = x.view(batch_size, -1)
x = self.layer_1(x)
x1 = F.relu(x)
x = self.layer_2(x1)
x2 = F.relu(x)
x3 = self.layer_3(x2)
return [x, x1, x2, x3]
def training_step(self, batch, batch_idx):
x, y = batch
out, l1_feats, l2_feats, l3_feats = self(x)
logits = F.log_softmax(out, dim=1)
ce_loss = F.nll_loss(logits, y)
loss = perceptual_loss(l1_feats, l2_feats, l3_feats) + ce_loss
return loss
model = MNISTRepresentator.load_from_checkpoint(PATH)
x = mnist_image()
feature_maps = model(x)
Or maybe we have a model that we use to do generation
class LitMNISTDreamer(LightningModule):
def forward(self, z):
imgs = self.decoder(z)
return imgs
def training_step(self, batch, batch_idx):
x, y = batch
representation = self.encoder(x)
imgs = self(representation)
loss = perceptual_loss(imgs, x)
return loss
model = LitMNISTDreamer.load_from_checkpoint(PATH)
z = sample_noise()
generated_imgs = model(z)
How you split up what goes in forward vs training_step depends on how you want to use this model for
prediction.
The nonessentials¶
Extensibility¶
Although lightning makes everything super simple, it doesn’t sacrifice any flexibility or control. Lightning offers multiple ways of managing the training state.
Training overrides¶
Any part of the training, validation, and testing loop can be modified. For instance, if you wanted to do your own backward pass, you would override the default implementation
def backward(self, use_amp, loss, optimizer):
loss.backward()
With your own
class LitMNIST(LightningModule):
def backward(self, use_amp, loss, optimizer, optimizer_idx):
# do a custom way of backward
loss.backward(retain_graph=True)
Every single part of training is configurable this way. For a full list look at LightningModule.
Callbacks¶
Another way to add arbitrary functionality is to add a custom callback for hooks that you might care about
from pytorch_lightning.callbacks import Callback
class MyPrintingCallback(Callback):
def on_init_start(self, trainer):
print('Starting to init trainer!')
def on_init_end(self, trainer):
print('Trainer is init now')
def on_train_end(self, trainer, pl_module):
print('do something when training ends')
And pass the callbacks into the trainer
trainer = Trainer(callbacks=[MyPrintingCallback()])
Tip
See full list of 12+ hooks in the Callback.
Child Modules¶
Research projects tend to test different approaches to the same dataset. This is very easy to do in Lightning with inheritance.
For example, imagine we now want to train an Autoencoder to use as a feature extractor for MNIST images. We are extending our Autoencoder from the LitMNIST-module which already defines all the dataloading. The only things that change in the Autoencoder model are the init, forward, training, validation and test step.
class Encoder(torch.nn.Module):
pass
class Decoder(torch.nn.Module):
pass
class AutoEncoder(LitMNIST):
def __init__(self):
super().__init__()
self.encoder = Encoder()
self.decoder = Decoder()
self.metric = MSE()
def forward(self, x):
return self.encoder(x)
def training_step(self, batch, batch_idx):
x, _ = batch
representation = self.encoder(x)
x_hat = self.decoder(representation)
loss = self.metric(x, x_hat)
return loss
def validation_step(self, batch, batch_idx):
self._shared_eval(batch, batch_idx, 'val')
def test_step(self, batch, batch_idx):
self._shared_eval(batch, batch_idx, 'test')
def _shared_eval(self, batch, batch_idx, prefix):
x, _ = batch
representation = self.encoder(x)
x_hat = self.decoder(representation)
loss = self.metric(x, x_hat)
self.log(f'{prefix}_loss', loss)
and we can train this using the same trainer
autoencoder = AutoEncoder()
trainer = Trainer()
trainer.fit(autoencoder)
And remember that the forward method should define the practical use of a LightningModule. In this case, we want to use the AutoEncoder to extract image representations
some_images = torch.Tensor(32, 1, 28, 28)
representations = autoencoder(some_images)
Transfer Learning¶
Using Pretrained Models¶
Sometimes we want to use a LightningModule as a pretrained model. This is fine because a LightningModule is just a torch.nn.Module!
Note
Remember that a LightningModule is EXACTLY a torch.nn.Module but with more capabilities.
Let’s use the AutoEncoder as a feature extractor in a separate model.
class Encoder(torch.nn.Module):
...
class AutoEncoder(LightningModule):
def __init__(self):
self.encoder = Encoder()
self.decoder = Decoder()
class CIFAR10Classifier(LightningModule):
def __init__(self):
# init the pretrained LightningModule
self.feature_extractor = AutoEncoder.load_from_checkpoint(PATH)
self.feature_extractor.freeze()
# the autoencoder outputs a 100-dim representation and CIFAR-10 has 10 classes
self.classifier = nn.Linear(100, 10)
def forward(self, x):
representations = self.feature_extractor(x)
x = self.classifier(representations)
...
We used our pretrained Autoencoder (a LightningModule) for transfer learning!
Example: Imagenet (computer Vision)¶
import torchvision.models as models
class ImagenetTransferLearning(LightningModule):
def __init__(self):
super().__init__()
# init a pretrained resnet
backbone = models.resnet50(pretrained=True)
num_filters = backbone.fc.in_features
layers = list(backbone.children())[:-1]
self.feature_extractor = torch.nn.Sequential(*layers)
# use the pretrained model to classify cifar-10 (10 image classes)
num_target_classes = 10
self.classifier = nn.Linear(num_filters, num_target_classes)
def forward(self, x):
self.feature_extractor.eval()
with torch.no_grad():
representations = self.feature_extractor(x).flatten(1)
x = self.classifier(representations)
...
Finetune
model = ImagenetTransferLearning()
trainer = Trainer()
trainer.fit(model)
And use it to predict your data of interest
model = ImagenetTransferLearning.load_from_checkpoint(PATH)
model.freeze()
x = some_images_from_cifar10()
predictions = model(x)
We used a pretrained model on imagenet, finetuned on CIFAR-10 to predict on CIFAR-10. In the non-academic world we would finetune on a tiny dataset you have and predict on your dataset.
Example: BERT (NLP)¶
Lightning is completely agnostic to what’s used for transfer learning so long as it is a torch.nn.Module subclass.
Here’s a model that uses Huggingface transformers.
class BertMNLIFinetuner(LightningModule):
def __init__(self):
super().__init__()
self.bert = BertModel.from_pretrained('bert-base-cased', output_attentions=True)
self.W = nn.Linear(bert.config.hidden_size, 3)
self.num_classes = 3
def forward(self, input_ids, attention_mask, token_type_ids):
h, _, attn = self.bert(input_ids=input_ids,
attention_mask=attention_mask,
token_type_ids=token_type_ids)
h_cls = h[:, 0]
logits = self.W(h_cls)
return logits, attn
Why PyTorch Lightning¶
a. Less boilerplate¶
Research and production code starts with simple code, but quickly grows in complexity once you add GPU training, 16-bit, checkpointing, logging, etc…
PyTorch Lightning implements these features for you and tests them rigorously to make sure you can instead focus on the research idea.
Writing less engineering/bolierplate code means:
fewer bugs
faster iteration
faster prototyping
b. More functionality¶
In PyTorch Lightning you leverage code written by hundreds of AI researchers, research engs and PhDs from the world’s top AI labs, implementing all the latest best practices and SOTA features such as
GPU, Multi GPU, TPU training
Multi-node training
Auto logging
…
Gradient accumulation
c. Less error-prone¶
Why re-invent the wheel?
Use PyTorch Lightning to enjoy a deep learning structure that is rigorously tested (500+ tests) across CPUs/multi-GPUs/multi-TPUs on every pull-request.
We promise our collective team of 20+ from the top labs has thought about training more than you :)
d. Not a new library¶
PyTorch Lightning is organized PyTorch - no need to learn a new framework.
Switching your model to Lightning is straight forward - here’s a 2-minute video on how to do it.
Your projects WILL grow in complexity and you WILL end up engineering more than trying out new ideas… Defer the hardest parts to Lightning!
Lightning Philosophy¶
Lightning structures your deep learning code in 4 parts:
Research code
Engineering code
Non-essential code
Data code
Research code¶
In the MNIST generation example, the research code would be the particular system and how it’s trained (ie: A GAN or VAE or GPT).
l1 = nn.Linear(...)
l2 = nn.Linear(...)
decoder = Decoder()
x1 = l1(x)
x2 = l2(x2)
out = decoder(features, x)
loss = perceptual_loss(x1, x2, x) + CE(out, x)
In Lightning, this code is organized into a LightningModule.
Engineering code¶
The Engineering code is all the code related to training this system. Things such as early stopping, distribution over GPUs, 16-bit precision, etc. This is normally code that is THE SAME across most projects.
model.cuda(0)
x = x.cuda(0)
distributed = DistributedParallel(model)
with gpu_zero:
download_data()
dist.barrier()
In Lightning, this code is abstracted out by the Trainer.
Non-essential code¶
This is code that helps the research but isn’t relevant to the research code. Some examples might be:
Inspect gradients
Log to tensorboard.
# log samples
z = Q.rsample()
generated = decoder(z)
self.experiment.log('images', generated)
In Lightning this code is organized into Callback.
Data code¶
Lightning uses standard PyTorch DataLoaders or anything that gives a batch of data. This code tends to end up getting messy with transforms, normalization constants, and data splitting spread all over files.
# data
train = MNIST(...)
train, val = split(train, val)
test = MNIST(...)
# transforms
train_transforms = ...
val_transforms = ...
test_transforms = ...
# dataloader ...
# download with dist.barrier() for multi-gpu, etc...
This code gets especially complicated once you start doing multi-GPU training or needing info about the data to build your models.
In Lightning this code is organized inside a LightningDataModule.
Tip
DataModules are optional but encouraged, otherwise you can use standard DataLoaders
API References¶
Core API¶
LightningDataModule for loading DataLoaders with ease. |
|
Decorator for LightningModule methods. |
|
Various hooks to be used in the Lightning code. |
|
nn.Module with additional great features. |
Callbacks API¶
Abstract base class used to build new callbacks. |
|
Early Stopping |
|
GPU Stats Monitor |
|
Gradient Accumulator |
|
Learning Rate Monitor |
|
Model Checkpointing |
|
Progress Bars |
Loggers API¶
Abstract base class used to build new loggers. |
|
Comet Logger |
|
CSV logger |
|
MLflow Logger |
|
Neptune Logger |
|
TensorBoard Logger |
|
Test Tube Logger |
|
Weights and Biases Logger |
Tuner API¶
Utilities API¶
Helper functions to help with reproducibility of models. |
Bolts¶
PyTorch Lightning Bolts, is our official collection of prebuilt models across many research domains.
pip install pytorch-lightning-bolts
In bolts we have:
A collection of pretrained state-of-the-art models.
A collection of models designed to bootstrap your research.
A collection of callbacks, transforms, full datasets.
All models work on CPUs, TPUs, GPUs and 16-bit precision.
Quality control¶
The Lightning community builds bolts and contributes them to Bolts. The lightning team guarantees that contributions are:
Rigorously Tested (CPUs, GPUs, TPUs).
Rigorously Documented.
Standardized via PyTorch Lightning.
Optimized for speed.
Checked for correctness.
Example 1: Pretrained, prebuilt models¶
from pl_bolts.models import VAE, GPT2, ImageGPT, PixelCNN
from pl_bolts.models.self_supervised import AMDIM, CPCV2, SimCLR, MocoV2
from pl_bolts.models import LinearRegression, LogisticRegression
from pl_bolts.models.gans import GAN
from pl_bolts.callbacks import PrintTableMetricsCallback
from pl_bolts.datamodules import FashionMNISTDataModule, CIFAR10DataModule, ImagenetDataModule
Example 2: Extend for faster research¶
Bolts are contributed with benchmarks and continuous-integration tests. This means you can trust the implementations and use them to bootstrap your research much faster.
from pl_bolts.models import ImageGPT
from pl_bolts.self_supervised import SimCLR
class VideoGPT(ImageGPT):
def training_step(self, batch, batch_idx):
x, y = batch
x = _shape_input(x)
logits = self.gpt(x)
simclr_features = self.simclr(x)
# -----------------
# do something new with GPT logits + simclr_features
# -----------------
loss = self.criterion(logits.view(-1, logits.size(-1)), x.view(-1).long())
logs = {"loss": loss}
return {"loss": loss, "log": logs}
Example 3: Callbacks¶
We also have a collection of callbacks.
from pl_bolts.callbacks import PrintTableMetricsCallback
import pytorch_lightning as pl
trainer = pl.Trainer(callbacks=[PrintTableMetricsCallback()])
# loss│train_loss│val_loss│epoch
# ──────────────────────────────
# 2.2541470527648926│2.2541470527648926│2.2158432006835938│0
Pytorch Ecosystem Examples¶
AWS/GCP training¶
Lightning has a native solution for training on AWS/GCP at scale (Lightning-Grid). Grid is in private early-access now but you can request access at grid.ai.
We’ve designed Grid to work for Lightning users without needing to make ANY changes to their code.
To use grid, take your regular command:
python my_model.py --learning_rate 1e-6 --layers 2 --gpus 4
And change it to use the grid train command:
grid train --grid_gpus 4 my_model.py --learning_rate 'uniform(1e-6, 1e-1, 20)' --layers '[2, 4, 8, 16]'
The above command will launch (20 * 4) experiments each running on 4 GPUs (320 GPUs!) - by making ZERO changes to your code.
The uniform command is part of our new expressive syntax which lets you construct hyperparameter combinations using over 20+ distributions, lists, etc. Of course, you can also configure all of this using yamls which can be dynamically assembled at runtime.
Hint
Grid supports the search strategy of your choice! (and much more than just sweeps)
16-bit training¶
Lightning offers 16-bit training for CPUs, GPUs, and TPUs.
GPU 16-bit¶
16-bit precision can cut your memory footprint by half. If using volta architecture GPUs it can give a dramatic training speed-up as well.
Note
PyTorch 1.6+ is recommended for 16-bit
Native torch¶
When using PyTorch 1.6+ Lightning uses the native amp implementation to support 16-bit.
# turn on 16-bit
trainer = Trainer(precision=16)
Apex 16-bit¶
If you are using an earlier version of PyTorch Lightning uses Apex to support 16-bit.
Follow these instructions to install Apex. To use 16-bit precision, do two things:
Install Apex
Set the “precision” trainer flag.
$ git clone https://github.com/NVIDIA/apex
$ cd apex
# ------------------------
# OPTIONAL: on your cluster you might need to load CUDA 10 or 9
# depending on how you installed PyTorch
# see available modules
module avail
# load correct CUDA before install
module load cuda-10.0
# ------------------------
# make sure you've loaded a cuda version > 4.0 and < 7.0
module load gcc-6.1.0
$ pip install -v --no-cache-dir --global-option="--cpp_ext" --global-option="--cuda_ext" ./
Warning
NVIDIA Apex and DDP have instability problems. We recommend native 16-bit in PyTorch 1.6+
Enable 16-bit¶
# turn on 16-bit
trainer = Trainer(amp_level='O2', precision=16)
If you need to configure the apex init for your particular use case or want to use a different way of doing
16-bit training, override pytorch_lightning.core.LightningModule.configure_apex().
TPU 16-bit¶
16-bit on TPUs is much simpler. To use 16-bit with TPUs set precision to 16 when using the TPU flag
# DEFAULT
trainer = Trainer(tpu_cores=8, precision=32)
# turn on 16-bit
trainer = Trainer(tpu_cores=8, precision=16)
Computing cluster (SLURM)¶
Lightning automates the details behind training on a SLURM-powered cluster.
Multi-node training¶
To train a model using multiple nodes, do the following:
Design your LightningModule.
Enable DDP in the trainer
# train on 32 GPUs across 4 nodes trainer = Trainer(gpus=8, num_nodes=4, accelerator='ddp')
It’s a good idea to structure your training script like this:
# train.py def main(hparams): model = LightningTemplateModel(hparams) trainer = pl.Trainer( gpus=8, num_nodes=4, accelerator='ddp' ) trainer.fit(model) if __name__ == '__main__': root_dir = os.path.dirname(os.path.realpath(__file__)) parent_parser = ArgumentParser(add_help=False) hyperparams = parser.parse_args() # TRAIN main(hyperparams)
Create the appropriate SLURM job:
# (submit.sh) #!/bin/bash -l # SLURM SUBMIT SCRIPT #SBATCH --nodes=4 #SBATCH --gres=gpu:8 #SBATCH --ntasks-per-node=8 #SBATCH --mem=0 #SBATCH --time=0-02:00:00 # activate conda env source activate $1 # debugging flags (optional) export NCCL_DEBUG=INFO export PYTHONFAULTHANDLER=1 # on your cluster you might need these: # set the network interface # export NCCL_SOCKET_IFNAME=^docker0,lo # might need the latest CUDA # module load NCCL/2.4.7-1-cuda.10.0 # run script from above srun python3 train.py
If you want auto-resubmit (read below), add this line to the submit.sh script
#SBATCH --signal=SIGUSR1@90Submit the SLURM job
sbatch submit.sh
Note
When running in DDP mode, any errors in your code will show up as an NCCL issue. Set the NCCL_DEBUG=INFO flag to see the ACTUAL error.
Normally now you would need to add a
DistributedSampler to your dataset, however
Lightning automates this for you. But if you still need to set a sampler set the Trainer flag
replace_sampler_ddp to False.
Here’s an example of how to add your own sampler (again, not needed with Lightning).
# in your LightningModule
def train_dataloader(self):
dataset = MyDataset()
dist_sampler = torch.utils.data.distributed.DistributedSampler(dataset)
dataloader = Dataloader(dataset, sampler=dist_sampler)
return dataloader
# in your training script
trainer = Trainer(replace_sampler_ddp=False)
Wall time auto-resubmit¶
When you use Lightning in a SLURM cluster, it automatically detects when it is about to run into the wall time and does the following:
Saves a temporary checkpoint.
Requeues the job.
When the job starts, it loads the temporary checkpoint.
To get this behavior make sure to add the correct signal to your SLURM script
# 90 seconds before training ends
SBATCH --signal=SIGUSR1@90
Building SLURM scripts¶
Instead of manually building SLURM scripts, you can use the SlurmCluster object to do this for you. The SlurmCluster can also run a grid search if you pass in a HyperOptArgumentParser.
Here is an example where you run a grid search of 9 combinations of hyperparameters. See also the multi-node examples here.
# grid search 3 values of learning rate and 3 values of number of layers for your net
# this generates 9 experiments (lr=1e-3, layers=16), (lr=1e-3, layers=32),
# (lr=1e-3, layers=64), ... (lr=1e-1, layers=64)
parser = HyperOptArgumentParser(strategy='grid_search', add_help=False)
parser.opt_list('--learning_rate', default=0.001, type=float,
options=[1e-3, 1e-2, 1e-1], tunable=True)
parser.opt_list('--layers', default=1, type=float, options=[16, 32, 64], tunable=True)
hyperparams = parser.parse_args()
# Slurm cluster submits 9 jobs, each with a set of hyperparams
cluster = SlurmCluster(
hyperparam_optimizer=hyperparams,
log_path='/some/path/to/save',
)
# OPTIONAL FLAGS WHICH MAY BE CLUSTER DEPENDENT
# which interface your nodes use for communication
cluster.add_command('export NCCL_SOCKET_IFNAME=^docker0,lo')
# see the output of the NCCL connection process
# NCCL is how the nodes talk to each other
cluster.add_command('export NCCL_DEBUG=INFO')
# setting a master port here is a good idea.
cluster.add_command('export MASTER_PORT=%r' % PORT)
# ************** DON'T FORGET THIS ***************
# MUST load the latest NCCL version
cluster.load_modules(['NCCL/2.4.7-1-cuda.10.0'])
# configure cluster
cluster.per_experiment_nb_nodes = 12
cluster.per_experiment_nb_gpus = 8
cluster.add_slurm_cmd(cmd='ntasks-per-node', value=8, comment='1 task per gpu')
# submit a script with 9 combinations of hyper params
# (lr=1e-3, layers=16), (lr=1e-3, layers=32), (lr=1e-3, layers=64), ... (lr=1e-1, layers=64)
cluster.optimize_parallel_cluster_gpu(
main,
nb_trials=9, # how many permutations of the grid search to run
job_name='name_for_squeue'
)
The other option is that you generate scripts on your own via a bash command or use another library.
Self-balancing architecture (COMING SOON)¶
Here Lightning distributes parts of your module across available GPUs to optimize for speed and memory.
Child Modules¶
Research projects tend to test different approaches to the same dataset. This is very easy to do in Lightning with inheritance.
For example, imagine we now want to train an Autoencoder to use as a feature extractor for MNIST images. We are extending our Autoencoder from the LitMNIST-module which already defines all the dataloading. The only things that change in the Autoencoder model are the init, forward, training, validation and test step.
class Encoder(torch.nn.Module):
pass
class Decoder(torch.nn.Module):
pass
class AutoEncoder(LitMNIST):
def __init__(self):
super().__init__()
self.encoder = Encoder()
self.decoder = Decoder()
self.metric = MSE()
def forward(self, x):
return self.encoder(x)
def training_step(self, batch, batch_idx):
x, _ = batch
representation = self.encoder(x)
x_hat = self.decoder(representation)
loss = self.metric(x, x_hat)
return loss
def validation_step(self, batch, batch_idx):
self._shared_eval(batch, batch_idx, 'val')
def test_step(self, batch, batch_idx):
self._shared_eval(batch, batch_idx, 'test')
def _shared_eval(self, batch, batch_idx, prefix):
x, _ = batch
representation = self.encoder(x)
x_hat = self.decoder(representation)
loss = self.metric(x, x_hat)
self.log(f'{prefix}_loss', loss)
and we can train this using the same trainer
autoencoder = AutoEncoder()
trainer = Trainer()
trainer.fit(autoencoder)
And remember that the forward method should define the practical use of a LightningModule. In this case, we want to use the AutoEncoder to extract image representations
some_images = torch.Tensor(32, 1, 28, 28)
representations = autoencoder(some_images)
Debugging¶
The following are flags that make debugging much easier.
fast_dev_run¶
This flag runs a “unit test” by running n if set to n (int) else 1 if set to True training and validation batch(es).
The point is to detect any bugs in the training/validation loop without having to wait for a full epoch to crash.
(See: fast_dev_run
argument of Trainer)
# runs 1 train, val, test batch and program ends
trainer = Trainer(fast_dev_run=True)
# runs 7 train, val, test batches and program ends
trainer = Trainer(fast_dev_run=7)
Note
This argument will disable tuner, checkpoint callbacks, early stopping callbacks,
loggers and logger callbacks like LearningRateLogger and runs for only 1 epoch.
Inspect gradient norms¶
Logs (to a logger), the norm of each weight matrix.
(See: track_grad_norm
argument of Trainer)
# the 2-norm
trainer = Trainer(track_grad_norm=2)
Log GPU usage¶
Logs (to a logger) the GPU usage for each GPU on the master machine.
(See: log_gpu_memory
argument of Trainer)
trainer = Trainer(log_gpu_memory=True)
Make model overfit on subset of data¶
A good debugging technique is to take a tiny portion of your data (say 2 samples per class), and try to get your model to overfit. If it can’t, it’s a sign it won’t work with large datasets.
(See: overfit_batches
argument of Trainer)
# use only 1% of training data (and use the same training dataloader (with shuffle off) in val and test)
trainer = Trainer(overfit_batches=0.01)
# similar, but with a fixed 10 batches no matter the size of the dataset
trainer = Trainer(overfit_batches=10)
With this flag, the train, val, and test sets will all be the same train set. We will also replace the sampler in the training set to turn off shuffle for you.
Print a summary of your LightningModule¶
Whenever the .fit() function gets called, the Trainer will print the weights summary for the LightningModule.
By default it only prints the top-level modules. If you want to show all submodules in your network, use the
‘full’ option:
trainer = Trainer(weights_summary='full')
You can also display the intermediate input- and output sizes of all your layers by setting the
example_input_array attribute in your LightningModule. It will print a table like this
| Name | Type | Params | In sizes | Out sizes
--------------------------------------------------------------
0 | net | Sequential | 132 K | [10, 256] | [10, 512]
1 | net.0 | Linear | 131 K | [10, 256] | [10, 512]
2 | net.1 | BatchNorm1d | 1.0 K | [10, 512] | [10, 512]
when you call .fit() on the Trainer. This can help you find bugs in the composition of your layers.
- See Also:
weights_summaryTrainer argumentModelSummary
Shorten epochs¶
Sometimes it’s helpful to only use a percentage of your training, val or test data (or a set number of batches). For example, you can use 20% of the training set and 1% of the validation set.
On larger datasets like Imagenet, this can help you debug or test a few things faster than waiting for a full epoch.
# use only 10% of training data and 1% of val data
trainer = Trainer(limit_train_batches=0.1, limit_val_batches=0.01)
# use 10 batches of train and 5 batches of val
trainer = Trainer(limit_train_batches=10, limit_val_batches=5)
Set the number of validation sanity steps¶
Lightning runs a few steps of validation in the beginning of training. This avoids crashing in the validation loop sometime deep into a lengthy training loop.
(See: num_sanity_val_steps
argument of Trainer)
# DEFAULT
trainer = Trainer(num_sanity_val_steps=2)
Loggers¶
Lightning supports the most popular logging frameworks (TensorBoard, Comet, etc…). TensorBoard is used by default,
but you can pass to the Trainer any combination of the following loggers.
Note
All loggers log by default to os.getcwd(). To change the path without creating a logger set Trainer(default_root_dir=’/your/path/to/save/checkpoints’)
Read more about Logging options.
To log arbitrary artifacts like images or audio samples use the trainer.log_dir property to resolve the path.
def training_step(self, batch, batch_idx):
img = ...
log_image(img, self.trainer.log_dir)
Comet.ml¶
Comet.ml is a third-party logger.
To use CometLogger as your logger do the following.
First, install the package:
pip install comet-ml
Then configure the logger and pass it to the Trainer:
import os
from pytorch_lightning.loggers import CometLogger
comet_logger = CometLogger(
api_key=os.environ.get('COMET_API_KEY'),
workspace=os.environ.get('COMET_WORKSPACE'), # Optional
save_dir='.', # Optional
project_name='default_project', # Optional
rest_api_key=os.environ.get('COMET_REST_API_KEY'), # Optional
experiment_name='default' # Optional
)
trainer = Trainer(logger=comet_logger)
The CometLogger is available anywhere except __init__ in your
LightningModule.
class MyModule(LightningModule):
def any_lightning_module_function_or_hook(self):
some_img = fake_image()
self.logger.experiment.add_image('generated_images', some_img, 0)
See also
CometLogger docs.
MLflow¶
MLflow is a third-party logger.
To use MLFlowLogger as your logger do the following.
First, install the package:
pip install mlflow
Then configure the logger and pass it to the Trainer:
from pytorch_lightning.loggers import MLFlowLogger
mlf_logger = MLFlowLogger(
experiment_name="default",
tracking_uri="file:./ml-runs"
)
trainer = Trainer(logger=mlf_logger)
See also
MLFlowLogger docs.
Neptune.ai¶
Neptune.ai is a third-party logger.
To use NeptuneLogger as your logger do the following.
First, install the package:
pip install neptune-client
Then configure the logger and pass it to the Trainer:
from pytorch_lightning.loggers import NeptuneLogger
neptune_logger = NeptuneLogger(
api_key='ANONYMOUS', # replace with your own
project_name='shared/pytorch-lightning-integration',
experiment_name='default', # Optional,
params={'max_epochs': 10}, # Optional,
tags=['pytorch-lightning', 'mlp'], # Optional,
)
trainer = Trainer(logger=neptune_logger)
The NeptuneLogger is available anywhere except __init__ in your
LightningModule.
class MyModule(LightningModule):
def any_lightning_module_function_or_hook(self):
some_img = fake_image()
self.logger.experiment.add_image('generated_images', some_img, 0)
See also
NeptuneLogger docs.
Tensorboard¶
To use TensorBoard as your logger do the following.
from pytorch_lightning.loggers import TensorBoardLogger
logger = TensorBoardLogger('tb_logs', name='my_model')
trainer = Trainer(logger=logger)
The TensorBoardLogger is available anywhere except __init__ in your
LightningModule.
class MyModule(LightningModule):
def any_lightning_module_function_or_hook(self):
some_img = fake_image()
self.logger.experiment.add_image('generated_images', some_img, 0)
See also
TensorBoardLogger docs.
Test Tube¶
Test Tube is a
TensorBoard logger but with nicer file structure.
To use TestTubeLogger as your logger do the following.
First, install the package:
pip install test_tube
Then configure the logger and pass it to the Trainer:
from pytorch_lightning.loggers import TestTubeLogger
logger = TestTubeLogger('tb_logs', name='my_model')
trainer = Trainer(logger=logger)
The TestTubeLogger is available anywhere except __init__ in your
LightningModule.
class MyModule(LightningModule):
def any_lightning_module_function_or_hook(self):
some_img = fake_image()
self.logger.experiment.add_image('generated_images', some_img, 0)
See also
TestTubeLogger docs.
Weights and Biases¶
Weights and Biases is a third-party logger.
To use WandbLogger as your logger do the following.
First, install the package:
pip install wandb
Then configure the logger and pass it to the Trainer:
from pytorch_lightning.loggers import WandbLogger
wandb_logger = WandbLogger(offline=True)
trainer = Trainer(logger=wandb_logger)
The WandbLogger is available anywhere except __init__ in your
LightningModule.
class MyModule(LightningModule):
def any_lightning_module_function_or_hook(self):
some_img = fake_image()
self.logger.experiment.log({
"generated_images": [wandb.Image(some_img, caption="...")]
})
See also
WandbLogger docs.
Multiple Loggers¶
Lightning supports the use of multiple loggers, just pass a list to the
Trainer.
from pytorch_lightning.loggers import TensorBoardLogger, TestTubeLogger
logger1 = TensorBoardLogger('tb_logs', name='my_model')
logger2 = TestTubeLogger('tb_logs', name='my_model')
trainer = Trainer(logger=[logger1, logger2])
The loggers are available as a list anywhere except __init__ in your
LightningModule.
class MyModule(LightningModule):
def any_lightning_module_function_or_hook(self):
some_img = fake_image()
# Option 1
self.logger.experiment[0].add_image('generated_images', some_img, 0)
# Option 2
self.logger[0].experiment.add_image('generated_images', some_img, 0)
Early stopping¶
Stopping an epoch early¶
You can stop an epoch early by overriding on_train_batch_start() to return -1 when some condition is met.
If you do this repeatedly, for every epoch you had originally requested, then this will stop your entire run.
Early stopping based on metric using the EarlyStopping Callback¶
The
EarlyStopping
callback can be used to monitor a validation metric and stop the training when no improvement is observed.
To enable it:
Import
EarlyStoppingcallback.Log the metric you want to monitor using
log()method.Init the callback, and set monitor to the logged metric of your choice.
Pass the
EarlyStoppingcallback to theTrainercallbacks flag.
from pytorch_lightning.callbacks.early_stopping import EarlyStopping
def validation_step(...):
self.log('val_loss', loss)
trainer = Trainer(callbacks=[EarlyStopping(monitor='val_loss')])
You can customize the callbacks behaviour by changing its parameters.
early_stop_callback = EarlyStopping(
monitor='val_accuracy',
min_delta=0.00,
patience=3,
verbose=False,
mode='max'
)
trainer = Trainer(callbacks=[early_stop_callback])
In case you need early stopping in a different part of training, subclass EarlyStopping
and change where it is called:
class MyEarlyStopping(EarlyStopping):
def on_validation_end(self, trainer, pl_module):
# override this to disable early stopping at the end of val loop
pass
def on_train_end(self, trainer, pl_module):
# instead, do it at the end of training loop
self._run_early_stopping_check(trainer, pl_module)
Note
The EarlyStopping callback runs
at the end of every validation epoch,
which, under the default configuration, happen after every training epoch.
However, the frequency of validation can be modified by setting various parameters
in the Trainer,
for example check_val_every_n_epoch
and val_check_interval.
It must be noted that the patience parameter counts the number of
validation epochs with no improvement, and not the number of training epochs.
Therefore, with parameters check_val_every_n_epoch=10 and patience=3, the trainer
will perform at least 40 training epochs before being stopped.
See also
See also
Fast Training¶
There are multiple options to speed up different parts of the training by choosing to train on a subset of data. This could be done for speed or debugging purposes.
Check validation every n epochs¶
If you have a small dataset you might want to check validation every n epochs
# DEFAULT
trainer = Trainer(check_val_every_n_epoch=1)
Force training for min or max epochs¶
It can be useful to force training for a minimum number of epochs or limit to a max number.
See also
# DEFAULT
trainer = Trainer(min_epochs=1, max_epochs=1000)
Set validation check frequency within 1 training epoch¶
For large datasets it’s often desirable to check validation multiple times within a training loop. Pass in a float to check that often within 1 training epoch. Pass in an int k to check every k training batches. Must use an int if using an IterableDataset.
# DEFAULT
trainer = Trainer(val_check_interval=0.95)
# check every .25 of an epoch
trainer = Trainer(val_check_interval=0.25)
# check every 100 train batches (ie: for `IterableDatasets` or fixed frequency)
trainer = Trainer(val_check_interval=100)
Use data subset for training, validation, and test¶
If you don’t want to check 100% of the training/validation/test set (for debugging or if it’s huge), set these flags.
# DEFAULT
trainer = Trainer(
limit_train_batches=1.0,
limit_val_batches=1.0,
limit_test_batches=1.0
)
# check 10%, 20%, 30% only, respectively for training, validation and test set
trainer = Trainer(
limit_train_batches=0.1,
limit_val_batches=0.2,
limit_test_batches=0.3
)
If you also pass shuffle=True to the dataloader, a different random subset of your dataset will be used for each epoch; otherwise the same subset will be used for all epochs.
Note
limit_train_batches, limit_val_batches and limit_test_batches will be overwritten by overfit_batches if overfit_batches > 0. limit_val_batches will be ignored if fast_dev_run=True.
Note
If you set limit_val_batches=0, validation will be disabled.
Hyperparameters¶
Lightning has utilities to interact seamlessly with the command line ArgumentParser
and plays well with the hyperparameter optimization framework of your choice.
ArgumentParser¶
Lightning is designed to augment a lot of the functionality of the built-in Python ArgumentParser
from argparse import ArgumentParser
parser = ArgumentParser()
parser.add_argument('--layer_1_dim', type=int, default=128)
args = parser.parse_args()
This allows you to call your program like so:
python trainer.py --layer_1_dim 64
Argparser Best Practices¶
It is best practice to layer your arguments in three sections.
Trainer args (
gpus,num_nodes, etc…)Model specific arguments (
layer_dim,num_layers,learning_rate, etc…)Program arguments (
data_path,cluster_email, etc…)
We can do this as follows. First, in your LightningModule, define the arguments
specific to that module. Remember that data splits or data paths may also be specific to
a module (i.e.: if your project has a model that trains on Imagenet and another on CIFAR-10).
class LitModel(LightningModule):
@staticmethod
def add_model_specific_args(parent_parser):
parser = ArgumentParser(parents=[parent_parser], add_help=False)
parser.add_argument('--encoder_layers', type=int, default=12)
parser.add_argument('--data_path', type=str, default='/some/path')
return parser
Now in your main trainer file, add the Trainer args, the program args, and add the model args
# ----------------
# trainer_main.py
# ----------------
from argparse import ArgumentParser
parser = ArgumentParser()
# add PROGRAM level args
parser.add_argument('--conda_env', type=str, default='some_name')
parser.add_argument('--notification_email', type=str, default='will@email.com')
# add model specific args
parser = LitModel.add_model_specific_args(parser)
# add all the available trainer options to argparse
# ie: now --gpus --num_nodes ... --fast_dev_run all work in the cli
parser = Trainer.add_argparse_args(parser)
args = parser.parse_args()
Now you can call run your program like so:
python trainer_main.py --gpus 2 --num_nodes 2 --conda_env 'my_env' --encoder_layers 12
Finally, make sure to start the training like so:
# init the trainer like this
trainer = Trainer.from_argparse_args(args, early_stopping_callback=...)
# NOT like this
trainer = Trainer(gpus=hparams.gpus, ...)
# init the model with Namespace directly
model = LitModel(args)
# or init the model with all the key-value pairs
dict_args = vars(args)
model = LitModel(**dict_args)
LightningModule hyperparameters¶
Often times we train many versions of a model. You might share that model or come back to it a few months later at which point it is very useful to know how that model was trained (i.e.: what learning rate, neural network, etc…).
Lightning has a few ways of saving that information for you in checkpoints and yaml files. The goal here is to improve readability and reproducibility.
The first way is to ask lightning to save the values of anything in the __init__ for you to the checkpoint. This also makes those values available via self.hparams.
class LitMNIST(LightningModule): def __init__(self, layer_1_dim=128, learning_rate=1e-2, **kwargs): super().__init__() # call this to save (layer_1_dim=128, learning_rate=1e-4) to the checkpoint self.save_hyperparameters() # equivalent self.save_hyperparameters('layer_1_dim', 'learning_rate') # Now possible to access layer_1_dim from hparams self.hparams.layer_1_dim
Sometimes your init might have objects or other parameters you might not want to save. In that case, choose only a few
class LitMNIST(LightningModule): def __init__(self, loss_fx, generator_network, layer_1_dim=128 **kwargs): super().__init__() self.layer_1_dim = layer_1_dim self.loss_fx = loss_fx # call this to save (layer_1_dim=128) to the checkpoint self.save_hyperparameters('layer_1_dim') # to load specify the other args model = LitMNIST.load_from_checkpoint(PATH, loss_fx=torch.nn.SomeOtherLoss, generator_network=MyGenerator())
Assign to self.hparams. Anything assigned to self.hparams will also be saved automatically.
# using a argparse.Namespace class LitMNIST(LightningModule): def __init__(self, hparams, *args, **kwargs): super().__init__() self.hparams = hparams self.layer_1 = torch.nn.Linear(28 * 28, self.hparams.layer_1_dim) self.layer_2 = torch.nn.Linear(self.hparams.layer_1_dim, self.hparams.layer_2_dim) self.layer_3 = torch.nn.Linear(self.hparams.layer_2_dim, 10) def train_dataloader(self): return DataLoader(mnist_train, batch_size=self.hparams.batch_size)
Warning
Deprecated since v1.1.0. This method of assigning hyperparameters to the LightningModule will no longer be supported from v1.3.0. Use the
self.save_hyperparameters()method from above instead.You can also save full objects such as dict or Namespace to the checkpoint.
# using a argparse.Namespace class LitMNIST(LightningModule): def __init__(self, conf, *args, **kwargs): super().__init__() self.save_hyperparameters(conf) self.layer_1 = torch.nn.Linear(28 * 28, self.hparams.layer_1_dim) self.layer_2 = torch.nn.Linear(self.hparams.layer_1_dim, self.hparams.layer_2_dim) self.layer_3 = torch.nn.Linear(self.hparams.layer_2_dim, 10) conf = OmegaConf.create(...) model = LitMNIST(conf) # Now possible to access any stored variables from hparams model.hparams.anything
Trainer args¶
To recap, add ALL possible trainer flags to the argparser and init the Trainer this way
parser = ArgumentParser()
parser = Trainer.add_argparse_args(parser)
hparams = parser.parse_args()
trainer = Trainer.from_argparse_args(hparams)
# or if you need to pass in callbacks
trainer = Trainer.from_argparse_args(hparams, checkpoint_callback=..., callbacks=[...])
Multiple Lightning Modules¶
We often have multiple Lightning Modules where each one has different arguments. Instead of
polluting the main.py file, the LightningModule lets you define arguments for each one.
class LitMNIST(LightningModule):
def __init__(self, layer_1_dim, **kwargs):
super().__init__()
self.layer_1 = torch.nn.Linear(28 * 28, layer_1_dim)
@staticmethod
def add_model_specific_args(parent_parser):
parser = ArgumentParser(parents=[parent_parser], add_help=False)
parser.add_argument('--layer_1_dim', type=int, default=128)
return parser
class GoodGAN(LightningModule):
def __init__(self, encoder_layers, **kwargs):
super().__init__()
self.encoder = Encoder(layers=encoder_layers)
@staticmethod
def add_model_specific_args(parent_parser):
parser = ArgumentParser(parents=[parent_parser], add_help=False)
parser.add_argument('--encoder_layers', type=int, default=12)
return parser
Now we can allow each model to inject the arguments it needs in the main.py
def main(args):
dict_args = vars(args)
# pick model
if args.model_name == 'gan':
model = GoodGAN(**dict_args)
elif args.model_name == 'mnist':
model = LitMNIST(**dict_args)
trainer = Trainer.from_argparse_args(args)
trainer.fit(model)
if __name__ == '__main__':
parser = ArgumentParser()
parser = Trainer.add_argparse_args(parser)
# figure out which model to use
parser.add_argument('--model_name', type=str, default='gan', help='gan or mnist')
# THIS LINE IS KEY TO PULL THE MODEL NAME
temp_args, _ = parser.parse_known_args()
# let the model add what it wants
if temp_args.model_name == 'gan':
parser = GoodGAN.add_model_specific_args(parser)
elif temp_args.model_name == 'mnist':
parser = LitMNIST.add_model_specific_args(parser)
args = parser.parse_args()
# train
main(args)
and now we can train MNIST or the GAN using the command line interface!
$ python main.py --model_name gan --encoder_layers 24
$ python main.py --model_name mnist --layer_1_dim 128
Learning Rate Finder¶
For training deep neural networks, selecting a good learning rate is essential for both better performance and faster convergence. Even optimizers such as Adam that are self-adjusting the learning rate can benefit from more optimal choices.
To reduce the amount of guesswork concerning choosing a good initial learning rate, a learning rate finder can be used. As described in this paper a learning rate finder does a small run where the learning rate is increased after each processed batch and the corresponding loss is logged. The result of this is a lr vs. loss plot that can be used as guidance for choosing a optimal initial lr.
Warning
For the moment, this feature only works with models having a single optimizer. LR Finder support for DDP is not implemented yet, it is coming soon.
Using Lightning’s built-in LR finder¶
To enable the learning rate finder, your LightningModule needs to have a learning_rate or lr property.
Then, set Trainer(auto_lr_find=True) during trainer construction,
and then call trainer.tune(model) to run the LR finder. The suggested learning_rate
will be written to the console and will be automatically set to your LightningModule,
which can be accessed via self.learning_rate or self.lr.
class LitModel(LightningModule):
def __init__(self, learning_rate):
self.learning_rate = learning_rate
def configure_optimizers(self):
return Adam(self.parameters(), lr=(self.lr or self.learning_rate))
model = LitModel()
# finds learning rate automatically
# sets hparams.lr or hparams.learning_rate to that learning rate
trainer = Trainer(auto_lr_find=True)
trainer.tune(model)
If your model is using an arbitrary value instead of self.lr or self.learning_rate, set that value as auto_lr_find:
model = LitModel()
# to set to your own hparams.my_value
trainer = Trainer(auto_lr_find='my_value')
trainer.tune(model)
If you want to inspect the results of the learning rate finder or just play around
with the parameters of the algorithm, this can be done by invoking the lr_find
method of the trainer. A typical example of this would look like
model = MyModelClass(hparams)
trainer = Trainer()
# Run learning rate finder
lr_finder = trainer.tuner.lr_find(model)
# Results can be found in
lr_finder.results
# Plot with
fig = lr_finder.plot(suggest=True)
fig.show()
# Pick point based on plot, or get suggestion
new_lr = lr_finder.suggestion()
# update hparams of the model
model.hparams.lr = new_lr
# Fit model
trainer.fit(model)
The figure produced by lr_finder.plot() should look something like the figure
below. It is recommended to not pick the learning rate that achieves the lowest
loss, but instead something in the middle of the sharpest downward slope (red point).
This is the point returned py lr_finder.suggestion().

The parameters of the algorithm can be seen below.
-
pytorch_lightning.tuner.lr_finder.lr_find(trainer, model, train_dataloader=None, val_dataloaders=None, min_lr=1e-08, max_lr=1, num_training=100, mode='exponential', early_stop_threshold=4.0, datamodule=None)[source] lr_find enables the user to do a range test of good initial learning rates, to reduce the amount of guesswork in picking a good starting learning rate.
- Parameters
model¶ (
LightningModule) – Model to do range testing fortrain_dataloader¶ (
Optional[DataLoader]) – A PyTorch DataLoader with training samples. If the model has a predefined train_dataloader method, this will be skipped.mode¶ (
str) – search strategy, either ‘linear’ or ‘exponential’. If set to ‘linear’ the learning rate will be searched by linearly increasing after each batch. If set to ‘exponential’, will increase learning rate exponentially.early_stop_threshold¶ (
float) – threshold for stopping the search. If the loss at any point is larger than early_stop_threshold*best_loss then the search is stopped. To disable, set to None.datamodule¶ (
Optional[LightningDataModule]) – An optional LightningDataModule which holds the training and validation dataloader(s). Note that the train_dataloader and val_dataloaders parameters cannot be used at the same time as this parameter, or a MisconfigurationException will be raised.
Example:
# Setup model and trainer model = MyModelClass(hparams) trainer = pl.Trainer() # Run lr finder lr_finder = trainer.tuner.lr_find(model, ...) # Inspect results fig = lr_finder.plot(); fig.show() suggested_lr = lr_finder.suggestion() # Overwrite lr and create new model hparams.lr = suggested_lr model = MyModelClass(hparams) # Ready to train with new learning rate trainer.fit(model)
Multi-GPU training¶
Lightning supports multiple ways of doing distributed training.
Preparing your code¶
To train on CPU/GPU/TPU without changing your code, we need to build a few good habits :)
Delete .cuda() or .to() calls¶
Delete any calls to .cuda() or .to(device).
# before lightning
def forward(self, x):
x = x.cuda(0)
layer_1.cuda(0)
x_hat = layer_1(x)
# after lightning
def forward(self, x):
x_hat = layer_1(x)
Init tensors using type_as and register_buffer¶
When you need to create a new tensor, use type_as. This will make your code scale to any arbitrary number of GPUs or TPUs with Lightning.
# before lightning
def forward(self, x):
z = torch.Tensor(2, 3)
z = z.cuda(0)
# with lightning
def forward(self, x):
z = torch.Tensor(2, 3)
z = z.type_as(x)
The LightningModule knows what device it is on. You can access the reference via self.device.
Sometimes it is necessary to store tensors as module attributes. However, if they are not parameters they will
remain on the CPU even if the module gets moved to a new device. To prevent that and remain device agnostic,
register the tensor as a buffer in your modules’s __init__ method with register_buffer().
class LitModel(LightningModule):
def __init__(self):
...
self.register_buffer("sigma", torch.eye(3))
# you can now access self.sigma anywhere in your module
Remove samplers¶
In PyTorch, you must use DistributedSampler
for multi-node or TPU training. The sampler makes sure each GPU sees the appropriate part of your data.
# without lightning
def train_dataloader(self):
dataset = MNIST(...)
sampler = None
if self.on_tpu:
sampler = DistributedSampler(dataset)
return DataLoader(dataset, sampler=sampler)
Lightning adds the correct samplers when needed, so no need to explicitly add samplers.
# with lightning
def train_dataloader(self):
dataset = MNIST(...)
return DataLoader(dataset)
Note
By default it will add shuffle=True for train sampler and shuffle=False for val/test sampler.
drop_last in DistributedSampler will be set to its default value in PyTorch.
Note
You can disable this behavior with Trainer(replace_sampler_ddp=False)
Note
For iterable datasets, we don’t do this automatically.
Synchronize validation and test logging¶
When running in distributed mode, we have to ensure that the validation and test step logging calls are synchronized across processes.
This is done by adding sync_dist=True to all self.log calls in the validation and test step.
This ensures that each GPU worker has the same behaviour when tracking model checkpoints, which is important for later downstream tasks such as testing the best checkpoint across all workers.
Note if you use any built in metrics or custom metrics that use the Metrics API, these do not need to be updated and are automatically handled for you.
def validation_step(self, batch, batch_idx):
x, y = batch
logits = self(x)
loss = self.loss(logits, y)
# Add sync_dist=True to sync logging across all GPU workers
self.log('validation_loss', loss, on_step=True, on_epoch=True, sync_dist=True)
def test_step(self, batch, batch_idx):
x, y = batch
logits = self(x)
loss = self.loss(logits, y)
# Add sync_dist=True to sync logging across all GPU workers
self.log('test_loss', loss, on_step=True, on_epoch=True, sync_dist=True)
Make models pickleable¶
It’s very likely your code is already pickleable, in that case no change in necessary. However, if you run a distributed model and get the following error:
self._launch(process_obj)
File "/net/software/local/python/3.6.5/lib/python3.6/multiprocessing/popen_spawn_posix.py", line 47,
in _launch reduction.dump(process_obj, fp)
File "/net/software/local/python/3.6.5/lib/python3.6/multiprocessing/reduction.py", line 60, in dump
ForkingPickler(file, protocol).dump(obj)
_pickle.PicklingError: Can't pickle <function <lambda> at 0x2b599e088ae8>:
attribute lookup <lambda> on __main__ failed
This means something in your model definition, transforms, optimizer, dataloader or callbacks cannot be pickled, and the following code will fail:
import pickle
pickle.dump(some_object)
This is a limitation of using multiple processes for distributed training within PyTorch. To fix this issue, find your piece of code that cannot be pickled. The end of the stacktrace is usually helpful. ie: in the stacktrace example here, there seems to be a lambda function somewhere in the code which cannot be pickled.
self._launch(process_obj)
File "/net/software/local/python/3.6.5/lib/python3.6/multiprocessing/popen_spawn_posix.py", line 47,
in _launch reduction.dump(process_obj, fp)
File "/net/software/local/python/3.6.5/lib/python3.6/multiprocessing/reduction.py", line 60, in dump
ForkingPickler(file, protocol).dump(obj)
_pickle.PicklingError: Can't pickle [THIS IS THE THING TO FIND AND DELETE]:
attribute lookup <lambda> on __main__ failed
Select GPU devices¶
You can select the GPU devices using ranges, a list of indices or a string containing a comma separated list of GPU ids:
# DEFAULT (int) specifies how many GPUs to use per node
Trainer(gpus=k)
# Above is equivalent to
Trainer(gpus=list(range(k)))
# Specify which GPUs to use (don't use when running on cluster)
Trainer(gpus=[0, 1])
# Equivalent using a string
Trainer(gpus='0, 1')
# To use all available GPUs put -1 or '-1'
# equivalent to list(range(torch.cuda.device_count()))
Trainer(gpus=-1)
The table below lists examples of possible input formats and how they are interpreted by Lightning. Note in particular the difference between gpus=0, gpus=[0] and gpus=”0”.
gpus |
Type |
Parsed |
Meaning |
|---|---|---|---|
None |
NoneType |
None |
CPU |
0 |
int |
None |
CPU |
3 |
int |
[0, 1, 2] |
first 3 GPUs |
-1 |
int |
[0, 1, 2, …] |
all available GPUs |
[0] |
list |
[0] |
GPU 0 |
[1, 3] |
list |
[1, 3] |
GPUs 1 and 3 |
“0” |
str |
[0] |
GPU 0 |
“3” |
str |
[3] |
GPU 3 |
“1, 3” |
str |
[1, 3] |
GPUs 1 and 3 |
“-1” |
str |
[0, 1, 2, …] |
all available GPUs |
Note
When specifying number of gpus as an integer gpus=k, setting the trainer flag
auto_select_gpus=True will automatically help you find k gpus that are not
occupied by other processes. This is especially useful when GPUs are configured
to be in “exclusive mode”, such that only one process at a time can access them.
For more details see the Trainer guide.
Distributed modes¶
Lightning allows multiple ways of training
Data Parallel (
accelerator='dp') (multiple-gpus, 1 machine)DistributedDataParallel (
accelerator='ddp') (multiple-gpus across many machines (python script based)).DistributedDataParallel (
accelerator='ddp_spawn') (multiple-gpus across many machines (spawn based)).DistributedDataParallel 2 (
accelerator='ddp2') (DP in a machine, DDP across machines).Horovod (
accelerator='horovod') (multi-machine, multi-gpu, configured at runtime)TPUs (
tpu_cores=8|x) (tpu or TPU pod)
Note
If you request multiple GPUs or nodes without setting a mode, DDP will be automatically used.
For a deeper understanding of what Lightning is doing, feel free to read this guide.
Data Parallel¶
DataParallel (DP) splits a batch across k GPUs.
That is, if you have a batch of 32 and use DP with 2 gpus, each GPU will process 16 samples,
after which the root node will aggregate the results.
Warning
DP use is discouraged by PyTorch and Lightning. Use DDP which is more stable and at least 3x faster
# train on 2 GPUs (using DP mode)
trainer = Trainer(gpus=2, accelerator='dp')
Distributed Data Parallel¶
DistributedDataParallel (DDP) works as follows:
Each GPU across each node gets its own process.
Each GPU gets visibility into a subset of the overall dataset. It will only ever see that subset.
Each process inits the model.
Note
Make sure to set the random seed before the instantiation of a Trainer() so that each model initializes with the same weights.
Each process performs a full forward and backward pass in parallel.
The gradients are synced and averaged across all processes.
Each process updates its optimizer.
# train on 8 GPUs (same machine (ie: node))
trainer = Trainer(gpus=8, accelerator='ddp')
# train on 32 GPUs (4 nodes)
trainer = Trainer(gpus=8, accelerator='ddp', num_nodes=4)
This Lightning implementation of DDP calls your script under the hood multiple times with the correct environment variables:
# example for 3 GPUs DDP
MASTER_ADDR=localhost MASTER_PORT=random() WORLD_SIZE=3 NODE_RANK=0 LOCAL_RANK=0 python my_file.py --gpus 3 --etc
MASTER_ADDR=localhost MASTER_PORT=random() WORLD_SIZE=3 NODE_RANK=1 LOCAL_RANK=0 python my_file.py --gpus 3 --etc
MASTER_ADDR=localhost MASTER_PORT=random() WORLD_SIZE=3 NODE_RANK=2 LOCAL_RANK=0 python my_file.py --gpus 3 --etc
We use DDP this way because ddp_spawn has a few limitations (due to Python and PyTorch):
Since .spawn() trains the model in subprocesses, the model on the main process does not get updated.
Dataloader(num_workers=N), where N is large, bottlenecks training with DDP… ie: it will be VERY slow or won’t work at all. This is a PyTorch limitation.
Forces everything to be picklable.
There are cases in which it is NOT possible to use DDP. Examples are:
Jupyter Notebook, Google COLAB, Kaggle, etc.
You have a nested script without a root package
Your script needs to invoke both .fit and .test, or one of them multiple times
In these situations you should use dp or ddp_spawn instead.
Distributed Data Parallel 2¶
In certain cases, it’s advantageous to use all batches on the same machine instead of a subset. For instance, you might want to compute a NCE loss where it pays to have more negative samples.
In this case, we can use DDP2 which behaves like DP in a machine and DDP across nodes. DDP2 does the following:
Copies a subset of the data to each node.
Inits a model on each node.
Runs a forward and backward pass using DP.
Syncs gradients across nodes.
Applies the optimizer updates.
# train on 32 GPUs (4 nodes)
trainer = Trainer(gpus=8, accelerator='ddp2', num_nodes=4)
Distributed Data Parallel Spawn¶
ddp_spawn is exactly like ddp except that it uses .spawn to start the training processes.
Warning
It is STRONGLY recommended to use DDP for speed and performance.
mp.spawn(self.ddp_train, nprocs=self.num_processes, args=(model, ))
If your script does not support being called from the command line (ie: it is nested without a root project module) you can use the following method:
# train on 8 GPUs (same machine (ie: node))
trainer = Trainer(gpus=8, accelerator='ddp_spawn')
We STRONGLY discourage this use because it has limitations (due to Python and PyTorch):
The model you pass in will not update. Please save a checkpoint and restore from there.
Set Dataloader(num_workers=0) or it will bottleneck training.
ddp is MUCH faster than ddp_spawn. We recommend you
Install a top-level module for your project using setup.py
# setup.py
#!/usr/bin/env python
from setuptools import setup, find_packages
setup(name='src',
version='0.0.1',
description='Describe Your Cool Project',
author='',
author_email='',
url='https://github.com/YourSeed', # REPLACE WITH YOUR OWN GITHUB PROJECT LINK
install_requires=[
'pytorch-lightning'
],
packages=find_packages()
)
Setup your project like so:
/project
/src
some_file.py
/or_a_folder
setup.py
Install as a root-level package
cd /project
pip install -e .
You can then call your scripts anywhere
cd /project/src
python some_file.py --accelerator 'ddp' --gpus 8
Horovod¶
Horovod allows the same training script to be used for single-GPU, multi-GPU, and multi-node training.
Like Distributed Data Parallel, every process in Horovod operates on a single GPU with a fixed subset of the data. Gradients are averaged across all GPUs in parallel during the backward pass, then synchronously applied before beginning the next step.
The number of worker processes is configured by a driver application (horovodrun or mpirun). In the training script, Horovod will detect the number of workers from the environment, and automatically scale the learning rate to compensate for the increased total batch size.
Horovod can be configured in the training script to run with any number of GPUs / processes as follows:
# train Horovod on GPU (number of GPUs / machines provided on command-line)
trainer = Trainer(accelerator='horovod', gpus=1)
# train Horovod on CPU (number of processes / machines provided on command-line)
trainer = Trainer(accelerator='horovod')
When starting the training job, the driver application will then be used to specify the total number of worker processes:
# run training with 4 GPUs on a single machine
horovodrun -np 4 python train.py
# run training with 8 GPUs on two machines (4 GPUs each)
horovodrun -np 8 -H hostname1:4,hostname2:4 python train.py
See the official Horovod documentation for details on installation and performance tuning.
DP/DDP2 caveats¶
In DP and DDP2 each GPU within a machine sees a portion of a batch. DP and ddp2 roughly do the following:
def distributed_forward(batch, model):
batch = torch.Tensor(32, 8)
gpu_0_batch = batch[:8]
gpu_1_batch = batch[8:16]
gpu_2_batch = batch[16:24]
gpu_3_batch = batch[24:]
y_0 = model_copy_gpu_0(gpu_0_batch)
y_1 = model_copy_gpu_1(gpu_1_batch)
y_2 = model_copy_gpu_2(gpu_2_batch)
y_3 = model_copy_gpu_3(gpu_3_batch)
return [y_0, y_1, y_2, y_3]
So, when Lightning calls any of the training_step, validation_step, test_step you will only be operating on one of those pieces.
# the batch here is a portion of the FULL batch
def training_step(self, batch, batch_idx):
y_0 = batch
For most metrics, this doesn’t really matter. However, if you want to add something to your computational graph (like softmax) using all batch parts you can use the training_step_end step.
def training_step_end(self, outputs):
# only use when on dp
outputs = torch.cat(outputs, dim=1)
softmax = softmax(outputs, dim=1)
out = softmax.mean()
return out
In pseudocode, the full sequence is:
# get data
batch = next(dataloader)
# copy model and data to each gpu
batch_splits = split_batch(batch, num_gpus)
models = copy_model_to_gpus(model)
# in parallel, operate on each batch chunk
all_results = []
for gpu_num in gpus:
batch_split = batch_splits[gpu_num]
gpu_model = models[gpu_num]
out = gpu_model(batch_split)
all_results.append(out)
# use the full batch for something like softmax
full out = model.training_step_end(all_results)
To illustrate why this is needed, let’s look at DataParallel
def training_step(self, batch, batch_idx):
x, y = batch
y_hat = self(batch)
# on dp or ddp2 if we did softmax now it would be wrong
# because batch is actually a piece of the full batch
return y_hat
def training_step_end(self, batch_parts_outputs):
# batch_parts_outputs has outputs of each part of the batch
# do softmax here
outputs = torch.cat(outputs, dim=1)
softmax = softmax(outputs, dim=1)
out = softmax.mean()
return out
If training_step_end is defined it will be called regardless of TPU, DP, DDP, etc… which means it will behave the same regardless of the backend.
Validation and test step have the same option when using DP.
def validation_step_end(self, batch_parts_outputs):
...
def test_step_end(self, batch_parts_outputs):
...
Distributed and 16-bit precision¶
Due to an issue with Apex and DataParallel (PyTorch and NVIDIA issue), Lightning does not allow 16-bit and DP training. We tried to get this to work, but it’s an issue on their end.
Below are the possible configurations we support.
1 GPU |
1+ GPUs |
DP |
DDP |
16-bit |
command |
|---|---|---|---|---|---|
Y |
Trainer(gpus=1) |
||||
Y |
Y |
Trainer(gpus=1, precision=16) |
|||
Y |
Y |
Trainer(gpus=k, accelerator=’dp’) |
|||
Y |
Y |
Trainer(gpus=k, accelerator=’ddp’) |
|||
Y |
Y |
Y |
Trainer(gpus=k, accelerator=’ddp’, precision=16) |
Implement Your Own Distributed (DDP) training¶
If you need your own way to init PyTorch DDP you can override pytorch_lightning.plugins.ddp_plugin.DDPPlugin.init_ddp_connection().
If you also need to use your own DDP implementation, override pytorch_lightning.plugins.ddp_plugin.DDPPlugin.configure_ddp().
Model Parallelism [BETA]¶
Model Parallelism tackles training large models on distributed systems, by modifying distributed communications and memory management of the model. Unlike data parallelism, the model is partitioned in various ways across the GPUs, in most cases to reduce the memory overhead when training large models. This is useful when dealing with large Transformer based models, or in environments where GPU memory is limited.
Lightning currently offers the following methods to leverage model parallelism:
Sharded Training (partitioning your gradients and optimizer state across multiple GPUs, for reduced memory overhead with no performance loss)
Sequential Model Parallelism with Checkpointing (partition your
nn.Sequentialmodule across multiple GPUs, leverage checkpointing and microbatching for further memory improvements and device utilization)
Sharded Training¶
Lightning integration of optimizer sharded training provided by FairScale. The technique can be found within DeepSpeed ZeRO and ZeRO-2, however the implementation is built from the ground up to be pytorch compatible and standalone. Sharded Training allows you to maintain GPU scaling efficiency, whilst reducing memory overhead drastically. In short, expect normal linear scaling, and significantly reduced memory usage when training large models.
Sharded Training still utilizes Data Parallel Training under the hood, except optimizer states and gradients are sharded across GPUs. This means the memory overhead per GPU is lower, as each GPU only has to maintain a partition of your optimizer state and gradients.
The benefits vary by model and parameter sizes, but we’ve recorded up to a 63% memory reduction per GPU allowing us to double our model sizes. Because of extremely efficient communication, these benefits in multi-GPU setups are almost free and throughput scales well with multi-node setups.
Below we use the NeMo Transformer Lightning Language Modeling example to benchmark the maximum batch size and model size that can be fit on 8 A100 GPUs for DDP vs Sharded Training. Note that the benefits can still be obtained using 2 or more GPUs, and for even larger batch sizes you can scale to multiple nodes.
Increase Your Batch Size
Use Sharded Training to scale your batch size further using the same compute. This will reduce your overall epoch time.
Distributed Training |
Model Size (Millions) |
Max Batch Size |
Percentage Gain (%) |
|---|---|---|---|
Native DDP |
930 |
32 |
|
Sharded DDP |
930 |
52 |
48% |
Increase Your Model Size
Use Sharded Training to scale your model size further using the same compute.
Distributed Training |
Batch Size |
Max Model Size (Millions) |
Percentage Gain (%) |
|---|---|---|---|
Native DDP |
32 |
930 |
|
Sharded DDP |
32 |
1404 |
41% |
Native DDP |
8 |
1572 |
|
Sharded DDP |
8 |
2872 |
59% |
It is highly recommended to use Sharded Training in multi-GPU environments where memory is limited, or where training larger models are beneficial (500M+ parameter models). A technical note: as batch size scales, storing activations for the backwards pass becomes the bottleneck in training. As a result, sharding optimizer state and gradients becomes less impactful. Work within the future will bring optional sharding to activations and model parameters to reduce memory further, but come with a speed cost.
To use Sharded Training, you need to first install FairScale using the command below.
pip install fairscale
# train using Sharded DDP
trainer = Trainer(accelerator='ddp', plugins='ddp_sharded')
Sharded Training can work across all DDP variants by adding the additional --plugins ddp_sharded flag.
Internally we re-initialize your optimizers and shard them across your machines and processes. We handle all communication using PyTorch distributed, so no code changes are required.
Sequential Model Parallelism with Checkpointing¶
PyTorch Lightning integration for Sequential Model Parallelism using FairScale. Sequential Model Parallelism splits a sequential module onto multiple GPUs, reducing peak GPU memory requirements substantially. We also provide auto-balancing techniques through FairScale, to find optimal balances for the model across GPUs. In addition, we use Gradient Checkpointing to reduce GPU memory requirements further, and micro-batches to minimizing device under-utilization automatically.
Reference: https://arxiv.org/abs/1811.06965
Note
DDPSequentialPlugin is currently supported only for Pytorch 1.6.
To get started, install FairScale using the command below. We install a specific branch which contains PyTorch related fixes for Sequential Parallelism.
pip install https://github.com/PyTorchLightning/fairscale/archive/pl_1.1.0.zip
To use Sequential Model Parallelism, you must define a nn.Sequential module that defines the layers you wish to parallelize across GPUs.
This should be kept within the sequential_module variable within your LightningModule like below.
from pytorch_lightning.plugins.ddp_sequential_plugin import DDPSequentialPlugin
from pytorch_lightning import LightningModule
class MyModel(LightningModule):
def __init__(self):
...
self.sequential_module = torch.nn.Sequential(my_layers)
# Split my module across 4 gpus, one layer each
model = MyModel()
plugin = DDPSequentialPlugin(balance=[1, 1, 1, 1])
trainer = Trainer(accelerator='ddp', gpus=4, plugins=[plugin])
trainer.fit(model)
We provide a minimal example of Sequential Model Parallelism using a convolutional model training on cifar10, split onto GPUs here.
To run the example, you need to install Bolts. Install with pip install pytorch-lightning-bolts.
When running the Sequential Model Parallelism example on 2 GPUS we achieve these memory savings.
GPUS |
Without Balancing |
With Balancing |
|---|---|---|
Gpu 0 |
4436 MB |
1554 MB |
Gpu 1 |
~0 |
994 MB |
To run the example with Sequential Model Parallelism:
python pl_examples/basic_examples/conv_sequential_example.py --batch_size 1024 --gpus 2 --accelerator ddp --use_ddp_sequential
To run the same example without Sequential Model Parallelism:
python pl_examples/basic_examples/conv_sequential_example.py --batch_size 1024 --gpus 1
Batch size¶
When using distributed training make sure to modify your learning rate according to your effective batch size.
Let’s say you have a batch size of 7 in your dataloader.
class LitModel(LightningModule):
def train_dataloader(self):
return Dataset(..., batch_size=7)
In (DDP, Horovod) your effective batch size will be 7 * gpus * num_nodes.
# effective batch size = 7 * 8
Trainer(gpus=8, accelerator='ddp|horovod')
# effective batch size = 7 * 8 * 10
Trainer(gpus=8, num_nodes=10, accelerator='ddp|horovod')
In DDP2, your effective batch size will be 7 * num_nodes. The reason is that the full batch is visible to all GPUs on the node when using DDP2.
# effective batch size = 7
Trainer(gpus=8, accelerator='ddp2')
# effective batch size = 7 * 10
Trainer(gpus=8, num_nodes=10, accelerator='ddp2')
Note
Huge batch sizes are actually really bad for convergence. Check out: Accurate, Large Minibatch SGD: Training ImageNet in 1 Hour
TorchElastic¶
Lightning supports the use of TorchElastic to enable fault-tolerant and elastic distributed job scheduling. To use it, specify the ‘ddp’ or ‘ddp2’ backend and the number of gpus you want to use in the trainer.
Trainer(gpus=8, accelerator='ddp')
Following the TorchElastic Quickstart documentation, you then need to start a single-node etcd server on one of the hosts:
etcd --enable-v2
--listen-client-urls http://0.0.0.0:2379,http://127.0.0.1:4001
--advertise-client-urls PUBLIC_HOSTNAME:2379
And then launch the elastic job with:
python -m torchelastic.distributed.launch
--nnodes=MIN_SIZE:MAX_SIZE
--nproc_per_node=TRAINERS_PER_NODE
--rdzv_id=JOB_ID
--rdzv_backend=etcd
--rdzv_endpoint=ETCD_HOST:ETCD_PORT
YOUR_LIGHTNING_TRAINING_SCRIPT.py (--arg1 ... train script args...)
See the official TorchElastic documentation for details on installation and more use cases.
Jupyter Notebooks¶
Unfortunately any ddp_ is not supported in jupyter notebooks. Please use dp for multiple GPUs. This is a known Jupyter issue. If you feel like taking a stab at adding this support, feel free to submit a PR!
Pickle Errors¶
Multi-GPU training sometimes requires your model to be pickled. If you run into an issue with pickling try the following to figure out the issue
import pickle
model = YourModel()
pickle.dumps(model)
However, if you use ddp the pickling requirement is not there and you should be fine. If you use ddp_spawn the pickling requirement remains. This is a limitation of Python.
Multiple Datasets¶
Lightning supports multiple dataloaders in a few ways.
Create a dataloader that iterates multiple datasets under the hood.
In the validation and test loop you also have the option to return multiple dataloaders which lightning will call sequentially.
Multiple training dataloaders¶
For training, the best way to use multiple dataloaders is to create a DataLoader class
which wraps your multiple dataloaders (this of course also works for testing and validation
dataloaders).
class ConcatDataset(torch.utils.data.Dataset):
def __init__(self, *datasets):
self.datasets = datasets
def __getitem__(self, i):
return tuple(d[i] for d in self.datasets)
def __len__(self):
return min(len(d) for d in self.datasets)
class LitModel(LightningModule):
def train_dataloader(self):
concat_dataset = ConcatDataset(
datasets.ImageFolder(traindir_A),
datasets.ImageFolder(traindir_B)
)
loader = torch.utils.data.DataLoader(
concat_dataset,
batch_size=args.batch_size,
shuffle=True,
num_workers=args.workers,
pin_memory=True
)
return loader
def val_dataloader(self):
# SAME
...
def test_dataloader(self):
# SAME
...
Test/Val dataloaders¶
For validation and test dataloaders, lightning also gives you the additional option of passing multiple dataloaders back from each call.
See the following for more details:
def val_dataloader(self):
loader_1 = Dataloader()
loader_2 = Dataloader()
return [loader_1, loader_2]
Saving and loading weights¶
Lightning automates saving and loading checkpoints. Checkpoints capture the exact value of all parameters used by a model.
Checkpointing your training allows you to resume a training process in case it was interrupted, fine-tune a model or use a pre-trained model for inference without having to retrain the model.
Checkpoint saving¶
A Lightning checkpoint has everything needed to restore a training session including:
16-bit scaling factor (apex)
Current epoch
Global step
Model state_dict
State of all optimizers
State of all learningRate schedulers
State of all callbacks
The hyperparameters used for that model if passed in as hparams (Argparse.Namespace)
Automatic saving¶
Lightning automatically saves a checkpoint for you in your current working directory, with the state of your last training epoch. This makes sure you can resume training in case it was interrupted.
To change the checkpoint path pass in:
# saves checkpoints to '/your/path/to/save/checkpoints' at every epoch end
trainer = Trainer(default_root_dir='/your/path/to/save/checkpoints')
You can customize the checkpointing behavior to monitor any quantity of your training or validation steps. For example, if you want to update your checkpoints based on your validation loss:
Calculate any metric or other quantity you wish to monitor, such as validation loss.
Log the quantity using
log()method, with a key such as val_loss.Initializing the
ModelCheckpointcallback, and set monitor to be the key of your quantity.Pass the callback to the callbacks
Trainerflag.
from pytorch_lightning.callbacks import ModelCheckpoint
class LitAutoEncoder(pl.LightningModule):
def validation_step(self, batch, batch_idx):
x, y = batch
y_hat = self.backbone(x)
# 1. calculate loss
loss = F.cross_entropy(y_hat, y)
# 2. log `val_loss`
self.log('val_loss', loss)
# 3. Init ModelCheckpoint callback, monitoring 'val_loss'
checkpoint_callback = ModelCheckpoint(monitor='val_loss')
# 4. Add your callback to the callbacks list
trainer = Trainer(callbacks=[checkpoint_callback])
You can also control more advanced options, like save_top_k, to save the best k models and the mode of the monitored quantity (min/max), save_weights_only or period to set the interval of epochs between checkpoints, to avoid slowdowns.
from pytorch_lightning.callbacks import ModelCheckpoint
class LitAutoEncoder(pl.LightningModule):
def validation_step(self, batch, batch_idx):
x, y = batch
y_hat = self.backbone(x)
loss = F.cross_entropy(y_hat, y)
self.log('val_loss', loss)
# saves a file like: my/path/sample-mnist-epoch=02-val_loss=0.32.ckpt
checkpoint_callback = ModelCheckpoint(
monitor='val_loss',
dirpath='my/path/',
filename='sample-mnist-{epoch:02d}-{val_loss:.2f}',
save_top_k=3,
mode='min',
)
trainer = Trainer(callbacks=[checkpoint_callback])
You can retrieve the checkpoint after training by calling
checkpoint_callback = ModelCheckpoint(dirpath='my/path/')
trainer = Trainer(callbacks=[checkpoint_callback])
trainer.fit(model)
checkpoint_callback.best_model_path
Disabling checkpoints¶
You can disable checkpointing by passing
trainer = Trainer(checkpoint_callback=False)
The Lightning checkpoint also saves the arguments passed into the LightningModule init under the hyper_parameters key in the checkpoint.
class MyLightningModule(LightningModule):
def __init__(self, learning_rate, *args, **kwargs):
super().__init__()
self.save_hyperparameters()
# all init args were saved to the checkpoint
checkpoint = torch.load(CKPT_PATH)
print(checkpoint['hyper_parameters'])
# {'learning_rate': the_value}
Manual saving¶
You can manually save checkpoints and restore your model from the checkpointed state.
model = MyLightningModule(hparams)
trainer.fit(model)
trainer.save_checkpoint("example.ckpt")
new_model = MyModel.load_from_checkpoint(checkpoint_path="example.ckpt")
Manual saving with accelerators¶
Lightning also handles accelerators where multiple processes are running, such as DDP. For example, when using the DDP accelerator our training script is running across multiple devices at the same time. Lightning automatically ensures that the model is saved only on the main process, whilst other processes do not interfere with saving checkpoints. This requires no code changes as seen below.
trainer = Trainer(accelerator="ddp")
model = MyLightningModule(hparams)
trainer.fit(model)
# Saves only on the main process
trainer.save_checkpoint("example.ckpt")
Not using trainer.save_checkpoint can lead to unexpected behaviour and potential deadlock. Using other saving functions will result in all devices attempting to save the checkpoint. As a result, we highly recommend using the trainer’s save functionality.
If using custom saving functions cannot be avoided, we recommend using rank_zero_only() to ensure saving occurs only on the main process.
Checkpoint loading¶
To load a model along with its weights, biases and hyperparameters use the following method:
model = MyLightingModule.load_from_checkpoint(PATH)
print(model.learning_rate)
# prints the learning_rate you used in this checkpoint
model.eval()
y_hat = model(x)
But if you don’t want to use the values saved in the checkpoint, pass in your own here
class LitModel(LightningModule):
def __init__(self, in_dim, out_dim):
super().__init__()
self.save_hyperparameters()
self.l1 = nn.Linear(self.hparams.in_dim, self.hparams.out_dim)
you can restore the model like this
# if you train and save the model like this it will use these values when loading
# the weights. But you can overwrite this
LitModel(in_dim=32, out_dim=10)
# uses in_dim=32, out_dim=10
model = LitModel.load_from_checkpoint(PATH)
# uses in_dim=128, out_dim=10
model = LitModel.load_from_checkpoint(PATH, in_dim=128, out_dim=10)
-
classmethod
LightningModule.load_from_checkpoint(checkpoint_path, map_location=None, hparams_file=None, strict=True, **kwargs) Primary way of loading a model from a checkpoint. When Lightning saves a checkpoint it stores the arguments passed to __init__ in the checkpoint under hyper_parameters
Any arguments specified through *args and **kwargs will override args stored in hyper_parameters.
- Parameters
checkpoint_path¶ (
Union[str,IO]) – Path to checkpoint. This can also be a URL, or file-like objectmap_location¶ (
Union[Dict[str,str],str,device,int,Callable,None]) – If your checkpoint saved a GPU model and you now load on CPUs or a different number of GPUs, use this to map to the new setup. The behaviour is the same as intorch.load().hparams_file¶ (
Optional[str]) –Optional path to a .yaml file with hierarchical structure as in this example:
drop_prob: 0.2 dataloader: batch_size: 32
You most likely won’t need this since Lightning will always save the hyperparameters to the checkpoint. However, if your checkpoint weights don’t have the hyperparameters saved, use this method to pass in a .yaml file with the hparams you’d like to use. These will be converted into a
dictand passed into yourLightningModulefor use.If your model’s hparams argument is
Namespaceand .yaml file has hierarchical structure, you need to refactor your model to treat hparams asdict.strict¶ (
bool) – Whether to strictly enforce that the keys incheckpoint_pathmatch the keys returned by this module’s state dict. Default: True.kwargs¶ – Any extra keyword args needed to init the model. Can also be used to override saved hyperparameter values.
- Returns
LightningModulewith loaded weights and hyperparameters (if available).
Example
# load weights without mapping ... MyLightningModule.load_from_checkpoint('path/to/checkpoint.ckpt') # or load weights mapping all weights from GPU 1 to GPU 0 ... map_location = {'cuda:1':'cuda:0'} MyLightningModule.load_from_checkpoint( 'path/to/checkpoint.ckpt', map_location=map_location ) # or load weights and hyperparameters from separate files. MyLightningModule.load_from_checkpoint( 'path/to/checkpoint.ckpt', hparams_file='/path/to/hparams_file.yaml' ) # override some of the params with new values MyLightningModule.load_from_checkpoint( PATH, num_layers=128, pretrained_ckpt_path: NEW_PATH, ) # predict pretrained_model.eval() pretrained_model.freeze() y_hat = pretrained_model(x)
Restoring Training State¶
If you don’t just want to load weights, but instead restore the full training, do the following:
model = LitModel()
trainer = Trainer(resume_from_checkpoint='some/path/to/my_checkpoint.ckpt')
# automatically restores model, epoch, step, LR schedulers, apex, etc...
trainer.fit(model)
Optimization¶
Lightning offers two modes for managing the optimization process:
automatic optimization (AutoOpt)
manual optimization
For the majority of research cases, automatic optimization will do the right thing for you and it is what most users should use.
For advanced/expert users who want to do esoteric optimization schedules or techniques, use manual optimization.
Manual optimization¶
For advanced research topics like reinforcement learning, sparse coding, or GAN research, it may be desirable to manually manage the optimization process. To do so, do the following:
Disable automatic optimization in Trainer: Trainer(automatic_optimization=False)
Drop or ignore the optimizer_idx argument
Use self.manual_backward(loss) instead of loss.backward() to automatically scale your loss
def training_step(self, batch, batch_idx, optimizer_idx):
# 1. ignore optimizer_idx
# 2. `use_pl_optimizer=True` means `opt_g` and `opt_d` will be of type `LightningOptimizer`
# `LightningOptimizer` simply wrapped your optimizer and behave the same way !
# When calling `optimizer.step`, `LightningOptimizer` will just handle TPU, AMP, accumulate_grad_batches, etc ... for you.
# access your optimizers with `use_pl_optimizer=False` or `optimizer.optimizer` when using use_pl_optimizer=True
# use_pl_optimizer=True is the default
(opt_g, opt_d) = self.optimizers(use_pl_optimizer=True)
# do anything you want
loss_a = ...
# use self.backward which will also handle scaling the loss when using amp
self.manual_backward(loss_a, opt_g)
opt_g.step()
# do anything you want
loss_b = ...
# pass in any args that loss.backward() normally takes
self.manual_backward(loss_b, opt_d, retain_graph=True)
self.manual_backward(loss_b, opt_d)
opt_d.step()
# log losses
self.log('loss_a', loss_a)
self.log('loss_b', loss_b)
Note
This is only recommended for experts who need ultimate flexibility
Manual optimization does not yet support accumulated gradients but will be live in 1.1.0
Automatic optimization¶
With Lightning most users don’t have to think about when to call .backward(), .step(), .zero_grad(), since Lightning automates that for you.
Under the hood Lightning does the following:
for epoch in epochs:
for batch in data:
loss = model.training_step(batch, batch_idx, ...)
loss.backward()
optimizer.step()
optimizer.zero_grad()
for scheduler in schedulers:
scheduler.step()
In the case of multiple optimizers, Lightning does the following:
for epoch in epochs:
for batch in data:
for opt in optimizers:
disable_grads_for_other_optimizers()
train_step(opt)
opt.step()
for scheduler in schedulers:
scheduler.step()
Learning rate scheduling¶
Every optimizer you use can be paired with any LearningRateScheduler.
# no LR scheduler
def configure_optimizers(self):
return Adam(...)
# Adam + LR scheduler
def configure_optimizers(self):
optimizer = Adam(...)
scheduler = LambdaLR(optimizer, ...)
return [optimizer], [scheduler]
# The ReduceLROnPlateau scheduler requires a monitor
def configure_optimizers(self):
return {
'optimizer': Adam(...),
'lr_scheduler': ReduceLROnPlateau(optimizer, ...),
'monitor': 'metric_to_track'
}
# Two optimizers each with a scheduler
def configure_optimizers(self):
optimizer1 = Adam(...)
optimizer2 = SGD(...)
scheduler1 = LambdaLR(optimizer1, ...)
scheduler2 = LambdaLR(optimizer2, ...)
return [optimizer1, optimizer2], [scheduler1, scheduler2]
# Alternatively
def configure_optimizers(self):
optimizer1 = Adam(...)
optimizer2 = SGD(...)
scheduler1 = ReduceLROnPlateau(optimizer1, ...)
scheduler2 = LambdaLR(optimizer2, ...)
return (
{'optimizer': optimizer1, 'lr_scheduler': scheduler1, 'monitor': 'metric_to_track'},
{'optimizer': optimizer2, 'lr_scheduler': scheduler2},
)
# Same as above with additional params passed to the first scheduler
def configure_optimizers(self):
optimizers = [Adam(...), SGD(...)]
schedulers = [
{
'scheduler': ReduceLROnPlateau(optimizers[0], ...),
'monitor': 'metric_to_track',
'interval': 'epoch',
'frequency': 1,
'strict': True,
},
LambdaLR(optimizers[1], ...)
]
return optimizers, schedulers
Use multiple optimizers (like GANs)¶
To use multiple optimizers return > 1 optimizers from pytorch_lightning.core.LightningModule.configure_optimizers()
# one optimizer
def configure_optimizers(self):
return Adam(...)
# two optimizers, no schedulers
def configure_optimizers(self):
return Adam(...), SGD(...)
# Two optimizers, one scheduler for adam only
def configure_optimizers(self):
return [Adam(...), SGD(...)], {'scheduler': ReduceLROnPlateau(), 'monitor': 'metric_to_track'}
Lightning will call each optimizer sequentially:
for epoch in epochs:
for batch in data:
for opt in optimizers:
train_step(opt)
opt.step()
for scheduler in schedulers:
scheduler.step()
Step optimizers at arbitrary intervals¶
To do more interesting things with your optimizers such as learning rate warm-up or odd scheduling,
override the optimizer_step() function.
For example, here step optimizer A every 2 batches and optimizer B every 4 batches
Note
When using Trainer(enable_pl_optimizer=True), there is no need to call .zero_grad().
def optimizer_zero_grad(self, current_epoch, batch_idx, optimizer, opt_idx):
optimizer.zero_grad()
# Alternating schedule for optimizer steps (ie: GANs)
def optimizer_step(self, current_epoch, batch_nb, optimizer, optimizer_idx, closure, on_tpu=False, using_native_amp=False, using_lbfgs=False):
# update generator opt every 2 steps
if optimizer_idx == 0:
if batch_nb % 2 == 0 :
optimizer.step(closure=closure)
# update discriminator opt every 4 steps
if optimizer_idx == 1:
if batch_nb % 4 == 0 :
optimizer.step(closure=closure)
Note
When using Trainer(enable_pl_optimizer=True), .step accepts a boolean make_optimizer_step which can be used as follow.
def optimizer_zero_grad(self, current_epoch, batch_idx, optimizer, opt_idx):
optimizer.zero_grad()
# Alternating schedule for optimizer steps (ie: GANs)
def optimizer_step(self, current_epoch, batch_nb, optimizer, optimizer_idx, closure, on_tpu=False, using_native_amp=False, using_lbfgs=False):
# update generator opt every 2 steps
if optimizer_idx == 0:
optimizer.step(closure=closure, make_optimizer_step=(batch_nb % 2) == 0)
# update discriminator opt every 4 steps
if optimizer_idx == 1:
optimizer.step(closure=closure, make_optimizer_step=(batch_nb % 4) == 0)
Here we add a learning-rate warm up
# learning rate warm-up
def optimizer_step(self, current_epoch, batch_nb, optimizer, optimizer_idx, closure, on_tpu=False, using_native_amp=False, using_lbfgs=False):
# warm up lr
if self.trainer.global_step < 500:
lr_scale = min(1., float(self.trainer.global_step + 1) / 500.)
for pg in optimizer.param_groups:
pg['lr'] = lr_scale * self.hparams.learning_rate
# update params
optimizer.step(closure=closure)
Note
The default optimizer_step is relying on the internal LightningOptimizer to properly perform a step. It handles TPUs, AMP, accumulate_grad_batches, zero_grad, and much more …
# function hook in LightningModule
def optimizer_step(self, current_epoch, batch_nb, optimizer, optimizer_idx, closure, on_tpu=False, using_native_amp=False, using_lbfgs=False):
optimizer.step(closure=closure)
Note
To access your wrapped Optimizer from LightningOptimizer, do as follow.
# function hook in LightningModule
def optimizer_step(self, current_epoch, batch_nb, optimizer, optimizer_idx, closure, on_tpu=False, using_native_amp=False, using_lbfgs=False):
# `optimizer is a ``LightningOptimizer`` wrapping the optimizer.
# To access it, do as follow:
optimizer = optimizer.optimizer
# run step. However, it won't work on TPU, AMP, etc...
optimizer.step(closure=closure)
Using the closure functions for optimization¶
When using optimization schemes such as LBFGS, the second_order_closure needs to be enabled. By default, this function is defined by wrapping the training_step and the backward steps as follows
def second_order_closure(pl_module, split_batch, batch_idx, opt_idx, optimizer, hidden):
# Model training step on a given batch
result = pl_module.training_step(split_batch, batch_idx, opt_idx, hidden)
# Model backward pass
pl_module.backward(result, optimizer, opt_idx)
# on_after_backward callback
pl_module.on_after_backward(result.training_step_output, batch_idx, result.loss)
return result
# This default `second_order_closure` function can be enabled by passing it directly into the `optimizer.step`
def optimizer_step(self, current_epoch, batch_nb, optimizer, optimizer_idx, second_order_closure, on_tpu=False, using_native_amp=False, using_lbfgs=False):
# update params
optimizer.step(second_order_closure)
Performance and Bottleneck Profiler¶
Profiling your training run can help you understand if there are any bottlenecks in your code.
Built-in checks¶
PyTorch Lightning supports profiling standard actions in the training loop out of the box, including:
on_epoch_start
on_epoch_end
on_batch_start
tbptt_split_batch
model_forward
model_backward
on_after_backward
optimizer_step
on_batch_end
training_step_end
on_training_end
Enable simple profiling¶
If you only wish to profile the standard actions, you can set profiler=”simple” when constructing your Trainer object.
trainer = Trainer(..., profiler="simple")
The profiler’s results will be printed at the completion of a training fit().
Profiler Report
Action | Mean duration (s) | Total time (s)
-----------------------------------------------------------------
on_epoch_start | 5.993e-06 | 5.993e-06
get_train_batch | 0.0087412 | 16.398
on_batch_start | 5.0865e-06 | 0.0095372
model_forward | 0.0017818 | 3.3408
model_backward | 0.0018283 | 3.4282
on_after_backward | 4.2862e-06 | 0.0080366
optimizer_step | 0.0011072 | 2.0759
on_batch_end | 4.5202e-06 | 0.0084753
on_epoch_end | 3.919e-06 | 3.919e-06
on_train_end | 5.449e-06 | 5.449e-06
Advanced Profiling¶
If you want more information on the functions called during each event, you can use the AdvancedProfiler. This option uses Python’s cProfiler to provide a report of time spent on each function called within your code.
trainer = Trainer(..., profiler="advanced")
or
profiler = AdvancedProfiler()
trainer = Trainer(..., profiler=profiler)
The profiler’s results will be printed at the completion of a training fit(). This profiler report can be quite long, so you can also specify an output_filename to save the report instead of logging it to the output in your terminal. The output below shows the profiling for the action get_train_batch.
Profiler Report
Profile stats for: get_train_batch
4869394 function calls (4863767 primitive calls) in 18.893 seconds
Ordered by: cumulative time
List reduced from 76 to 10 due to restriction <10>
ncalls tottime percall cumtime percall filename:lineno(function)
3752/1876 0.011 0.000 18.887 0.010 {built-in method builtins.next}
1876 0.008 0.000 18.877 0.010 dataloader.py:344(__next__)
1876 0.074 0.000 18.869 0.010 dataloader.py:383(_next_data)
1875 0.012 0.000 18.721 0.010 fetch.py:42(fetch)
1875 0.084 0.000 18.290 0.010 fetch.py:44(<listcomp>)
60000 1.759 0.000 18.206 0.000 mnist.py:80(__getitem__)
60000 0.267 0.000 13.022 0.000 transforms.py:68(__call__)
60000 0.182 0.000 7.020 0.000 transforms.py:93(__call__)
60000 1.651 0.000 6.839 0.000 functional.py:42(to_tensor)
60000 0.260 0.000 5.734 0.000 transforms.py:167(__call__)
You can also reference this profiler in your LightningModule to profile specific actions of interest. If you don’t want to always have the profiler turned on, you can optionally pass a PassThroughProfiler which will allow you to skip profiling without having to make any code changes. Each profiler has a method profile() which returns a context handler. Simply pass in the name of your action that you want to track and the profiler will record performance for code executed within this context.
from pytorch_lightning.profiler import Profiler, PassThroughProfiler
class MyModel(LightningModule):
def __init__(self, profiler=None):
self.profiler = profiler or PassThroughProfiler()
def custom_processing_step(self, data):
with profiler.profile('my_custom_action'):
# custom processing step
return data
profiler = Profiler()
model = MyModel(profiler)
trainer = Trainer(profiler=profiler, max_epochs=1)
-
class
pytorch_lightning.profiler.BaseProfiler(output_streams=None)[source] Bases:
abc.ABCIf you wish to write a custom profiler, you should inhereit from this class.
-
describe()[source] Logs a profile report after the conclusion of the training run.
- Return type
None
-
profile(action_name)[source] Yields a context manager to encapsulate the scope of a profiled action.
Example:
with self.profile('load training data'): # load training data code
The profiler will start once you’ve entered the context and will automatically stop once you exit the code block.
- Return type
None
-
abstract
start(action_name)[source] Defines how to start recording an action.
- Return type
None
-
abstract
stop(action_name)[source] Defines how to record the duration once an action is complete.
- Return type
None
-
-
class
pytorch_lightning.profiler.SimpleProfiler(output_filename=None, extended=True)[source] Bases:
pytorch_lightning.profiler.profilers.BaseProfilerThis profiler simply records the duration of actions (in seconds) and reports the mean duration of each action and the total time spent over the entire training run.
- Parameters
output_filename¶ (
Optional[str]) – optionally save profile results to file instead of printing to std out when training is finished.
-
describe()[source] Logs a profile report after the conclusion of the training run.
-
start(action_name)[source] Defines how to start recording an action.
- Return type
None
-
stop(action_name)[source] Defines how to record the duration once an action is complete.
- Return type
None
-
class
pytorch_lightning.profiler.AdvancedProfiler(output_filename=None, line_count_restriction=1.0)[source] Bases:
pytorch_lightning.profiler.profilers.BaseProfilerThis profiler uses Python’s cProfiler to record more detailed information about time spent in each function call recorded during a given action. The output is quite verbose and you should only use this if you want very detailed reports.
- Parameters
output_filename¶ (
Optional[str]) – optionally save profile results to file instead of printing to std out when training is finished.line_count_restriction¶ (
float) – this can be used to limit the number of functions reported for each action. either an integer (to select a count of lines), or a decimal fraction between 0.0 and 1.0 inclusive (to select a percentage of lines)
-
describe()[source] Logs a profile report after the conclusion of the training run.
-
start(action_name)[source] Defines how to start recording an action.
- Return type
None
-
stop(action_name)[source] Defines how to record the duration once an action is complete.
- Return type
None
-
class
pytorch_lightning.profiler.PassThroughProfiler[source] Bases:
pytorch_lightning.profiler.profilers.BaseProfilerThis class should be used when you don’t want the (small) overhead of profiling. The Trainer uses this class by default.
Args: output_streams: callable
-
start(action_name)[source] Defines how to start recording an action.
- Return type
None
-
stop(action_name)[source] Defines how to record the duration once an action is complete.
- Return type
None
-
Single GPU Training¶
Make sure you are running on a machine that has at least one GPU. Lightning handles all the NVIDIA flags for you, there’s no need to set them yourself.
# train on 1 GPU (using dp mode)
trainer = Trainer(gpus=1)
Sequential Data¶
Lightning has built in support for dealing with sequential data.
Packed sequences as inputs¶
When using PackedSequence, do 2 things:
Return either a padded tensor in dataset or a list of variable length tensors in the dataloader collate_fn (example shows the list implementation).
Pack the sequence in forward or training and validation steps depending on use case.
# For use in dataloader
def collate_fn(batch):
x = [item[0] for item in batch]
y = [item[1] for item in batch]
return x, y
# In module
def training_step(self, batch, batch_nb):
x = rnn.pack_sequence(batch[0], enforce_sorted=False)
y = rnn.pack_sequence(batch[1], enforce_sorted=False)
Truncated Backpropagation Through Time¶
There are times when multiple backwards passes are needed for each batch. For example, it may save memory to use Truncated Backpropagation Through Time when training RNNs.
Lightning can handle TBTT automatically via this flag.
# DEFAULT (single backwards pass per batch)
trainer = Trainer(truncated_bptt_steps=None)
# (split batch into sequences of size 2)
trainer = Trainer(truncated_bptt_steps=2)
Note
If you need to modify how the batch is split,
override pytorch_lightning.core.LightningModule.tbptt_split_batch().
Note
Using this feature requires updating your LightningModule’s
pytorch_lightning.core.LightningModule.training_step() to include a hiddens arg.
Iterable Datasets¶
Lightning supports using IterableDatasets as well as map-style Datasets. IterableDatasets provide a more natural option when using sequential data.
Note
When using an IterableDataset you must set the val_check_interval to 1.0 (the default) or an int
(specifying the number of training batches to run before validation) when initializing the Trainer. This is
because the IterableDataset does not have a __len__ and Lightning requires this to calculate the validation
interval when val_check_interval is less than one. Similarly, you can set limit_{mode}_batches to a float or
an int. If it is set to 0.0 or 0 it will set num_{mode}_batches to 0, if it is an int it will set num_{mode}_batches
to limit_{mode}_batches, if it is set to 1.0 it will run for the whole dataset, otherwise it will throw an exception.
Here mode can be train/val/test.
# IterableDataset
class CustomDataset(IterableDataset):
def __init__(self, data):
self.data_source
def __iter__(self):
return iter(self.data_source)
# Setup DataLoader
def train_dataloader(self):
seq_data = ['A', 'long', 'time', 'ago', 'in', 'a', 'galaxy', 'far', 'far', 'away']
iterable_dataset = CustomDataset(seq_data)
dataloader = DataLoader(dataset=iterable_dataset, batch_size=5)
return dataloader
# Set val_check_interval
trainer = Trainer(val_check_interval=100)
# Set limit_val_batches to 0.0 or 0
trainer = Trainer(limit_val_batches=0.0)
# Set limit_val_batches as an int
trainer = Trainer(limit_val_batches=100)
Training Tricks¶
Lightning implements various tricks to help during training
Accumulate gradients¶
Accumulated gradients runs K small batches of size N before doing a backwards pass. The effect is a large effective batch size of size KxN.
See also
# DEFAULT (ie: no accumulated grads)
trainer = Trainer(accumulate_grad_batches=1)
Gradient Clipping¶
Gradient clipping may be enabled to avoid exploding gradients. Specifically, this will clip the gradient norm computed over all model parameters together.
See also
# DEFAULT (ie: don't clip)
trainer = Trainer(gradient_clip_val=0)
# clip gradients with norm above 0.5
trainer = Trainer(gradient_clip_val=0.5)
Auto scaling of batch size¶
Auto scaling of batch size may be enabled to find the largest batch size that fits into memory. Larger batch size often yields better estimates of gradients, but may also result in longer training time. Inspired by https://github.com/BlackHC/toma.
See also
# DEFAULT (ie: don't scale batch size automatically)
trainer = Trainer(auto_scale_batch_size=None)
# Autoscale batch size
trainer = Trainer(auto_scale_batch_size=None|'power'|'binsearch')
# find the batch size
trainer.tune(model)
Currently, this feature supports two modes ‘power’ scaling and ‘binsearch’ scaling. In ‘power’ scaling, starting from a batch size of 1 keeps doubling the batch size until an out-of-memory (OOM) error is encountered. Setting the argument to ‘binsearch’ will initially also try doubling the batch size until it encounters an OOM, after which it will do a binary search that will finetune the batch size. Additionally, it should be noted that the batch size scaler cannot search for batch sizes larger than the size of the training dataset.
Note
This feature expects that a batch_size field is either located as a model attribute i.e. model.batch_size or as a field in your hparams i.e. model.hparams.batch_size. The field should exist and will be overridden by the results of this algorithm. Additionally, your train_dataloader() method should depend on this field for this feature to work i.e.
def train_dataloader(self):
return DataLoader(train_dataset, batch_size=self.batch_size|self.hparams.batch_size)
Warning
Due to these constraints, this features does NOT work when passing dataloaders directly to .fit().
The scaling algorithm has a number of parameters that the user can control by invoking the trainer method .scale_batch_size themself (see description below).
# Use default in trainer construction
trainer = Trainer()
tuner = Tuner(trainer)
# Invoke method
new_batch_size = tuner.scale_batch_size(model, *extra_parameters_here)
# Override old batch size
model.hparams.batch_size = new_batch_size
# Fit as normal
trainer.fit(model)
- The algorithm in short works by:
Dumping the current state of the model and trainer
- Iteratively until convergence or maximum number of tries max_trials (default 25) has been reached:
Call fit() method of trainer. This evaluates steps_per_trial (default 3) number of training steps. Each training step can trigger an OOM error if the tensors (training batch, weights, gradients, etc.) allocated during the steps have a too large memory footprint.
If an OOM error is encountered, decrease batch size else increase it. How much the batch size is increased/decreased is determined by the chosen strategy.
The found batch size is saved to either model.batch_size or model.hparams.batch_size
Restore the initial state of model and trainer
-
class
pytorch_lightning.tuner.tuning.Tuner(trainer)[source] Bases:
object-
scale_batch_size(model, mode='power', steps_per_trial=3, init_val=2, max_trials=25, batch_arg_name='batch_size', **fit_kwargs)[source] Will iteratively try to find the largest batch size for a given model that does not give an out of memory (OOM) error.
- Parameters
model¶ – Model to fit.
mode¶ (
str) – string setting the search mode. Either power or binsearch. If mode is power we keep multiplying the batch size by 2, until we get an OOM error. If mode is ‘binsearch’, we will initially also keep multiplying by 2 and after encountering an OOM error do a binary search between the last successful batch size and the batch size that failed.steps_per_trial¶ (
int) – number of steps to run with a given batch size. Idealy 1 should be enough to test if a OOM error occurs, however in practise a few are neededinit_val¶ (
int) – initial batch size to start the search withmax_trials¶ (
int) – max number of increase in batch size done before algorithm is terminatedname of the attribute that stores the batch size. It is expected that the user has provided a model or datamodule that has a hyperparameter with that name. We will look for this attribute name in the following places
model
model.hparams
model.datamodule
trainer.datamodule (the datamodule passed to the tune method)
**fit_kwargs¶ – remaining arguments to be passed to .fit(), e.g., dataloader or datamodule.
-
Warning
Batch size finder is not supported for DDP yet, it is coming soon.
Sequential Model Parallelism with Checkpointing¶
PyTorch Lightning integration for Sequential Model Parallelism using FairScale. Sequential Model Parallelism splits a sequential module onto multiple GPUs, reducing peak GPU memory requirements substantially.
For more information, refer to Sequential Model Parallelism with Checkpointing.
Transfer Learning¶
Using Pretrained Models¶
Sometimes we want to use a LightningModule as a pretrained model. This is fine because a LightningModule is just a torch.nn.Module!
Note
Remember that a LightningModule is EXACTLY a torch.nn.Module but with more capabilities.
Let’s use the AutoEncoder as a feature extractor in a separate model.
class Encoder(torch.nn.Module):
...
class AutoEncoder(LightningModule):
def __init__(self):
self.encoder = Encoder()
self.decoder = Decoder()
class CIFAR10Classifier(LightningModule):
def __init__(self):
# init the pretrained LightningModule
self.feature_extractor = AutoEncoder.load_from_checkpoint(PATH)
self.feature_extractor.freeze()
# the autoencoder outputs a 100-dim representation and CIFAR-10 has 10 classes
self.classifier = nn.Linear(100, 10)
def forward(self, x):
representations = self.feature_extractor(x)
x = self.classifier(representations)
...
We used our pretrained Autoencoder (a LightningModule) for transfer learning!
Example: Imagenet (computer Vision)¶
import torchvision.models as models
class ImagenetTransferLearning(LightningModule):
def __init__(self):
super().__init__()
# init a pretrained resnet
backbone = models.resnet50(pretrained=True)
num_filters = backbone.fc.in_features
layers = list(backbone.children())[:-1]
self.feature_extractor = torch.nn.Sequential(*layers)
# use the pretrained model to classify cifar-10 (10 image classes)
num_target_classes = 10
self.classifier = nn.Linear(num_filters, num_target_classes)
def forward(self, x):
self.feature_extractor.eval()
with torch.no_grad():
representations = self.feature_extractor(x).flatten(1)
x = self.classifier(representations)
...
Finetune
model = ImagenetTransferLearning()
trainer = Trainer()
trainer.fit(model)
And use it to predict your data of interest
model = ImagenetTransferLearning.load_from_checkpoint(PATH)
model.freeze()
x = some_images_from_cifar10()
predictions = model(x)
We used a pretrained model on imagenet, finetuned on CIFAR-10 to predict on CIFAR-10. In the non-academic world we would finetune on a tiny dataset you have and predict on your dataset.
Example: BERT (NLP)¶
Lightning is completely agnostic to what’s used for transfer learning so long as it is a torch.nn.Module subclass.
Here’s a model that uses Huggingface transformers.
class BertMNLIFinetuner(LightningModule):
def __init__(self):
super().__init__()
self.bert = BertModel.from_pretrained('bert-base-cased', output_attentions=True)
self.W = nn.Linear(bert.config.hidden_size, 3)
self.num_classes = 3
def forward(self, input_ids, attention_mask, token_type_ids):
h, _, attn = self.bert(input_ids=input_ids,
attention_mask=attention_mask,
token_type_ids=token_type_ids)
h_cls = h[:, 0]
logits = self.W(h_cls)
return logits, attn
TPU support¶
Lightning supports running on TPUs. At this moment, TPUs are available on Google Cloud (GCP), Google Colab and Kaggle Environments. For more information on TPUs watch this video.
TPU Terminology¶
A TPU is a Tensor processing unit. Each TPU has 8 cores where each core is optimized for 128x128 matrix multiplies. In general, a single TPU is about as fast as 5 V100 GPUs!
A TPU pod hosts many TPUs on it. Currently, TPU pod v2 has 2048 cores! You can request a full pod from Google cloud or a “slice” which gives you some subset of those 2048 cores.
How to access TPUs¶
To access TPUs, there are three main ways.
Using Google Colab.
Using Google Cloud (GCP).
Using Kaggle.
Colab TPUs¶
Colab is like a jupyter notebook with a free GPU or TPU hosted on GCP.
To get a TPU on colab, follow these steps:
Click “new notebook” (bottom right of pop-up).
Click runtime > change runtime settings. Select Python 3, and hardware accelerator “TPU”. This will give you a TPU with 8 cores.
Next, insert this code into the first cell and execute. This will install the xla library that interfaces between PyTorch and the TPU.
!curl https://raw.githubusercontent.com/pytorch/xla/master/contrib/scripts/env-setup.py -o pytorch-xla-env-setup.py !python pytorch-xla-env-setup.py --version nightly --apt-packages libomp5 libopenblas-dev
Once the above is done, install PyTorch Lightning (v 0.7.0+).
!pip install pytorch-lightning
Then set up your LightningModule as normal.
DistributedSamplers¶
Lightning automatically inserts the correct samplers - no need to do this yourself!
Usually, with TPUs (and DDP), you would need to define a DistributedSampler to move the right chunk of data to the appropriate TPU. As mentioned, this is not needed in Lightning
Note
Don’t add distributedSamplers. Lightning does this automatically
If for some reason you still need to, this is how to construct the sampler for TPU use
import torch_xla.core.xla_model as xm
def train_dataloader(self):
dataset = MNIST(
os.getcwd(),
train=True,
download=True,
transform=transforms.ToTensor()
)
# required for TPU support
sampler = None
if use_tpu:
sampler = torch.utils.data.distributed.DistributedSampler(
dataset,
num_replicas=xm.xrt_world_size(),
rank=xm.get_ordinal(),
shuffle=True
)
loader = DataLoader(
dataset,
sampler=sampler,
batch_size=32
)
return loader
Configure the number of TPU cores in the trainer. You can only choose 1 or 8. To use a full TPU pod skip to the TPU pod section.
import pytorch_lightning as pl
my_model = MyLightningModule()
trainer = pl.Trainer(tpu_cores=8)
trainer.fit(my_model)
That’s it! Your model will train on all 8 TPU cores.
TPU core training
Lightning supports training on a single TPU core or 8 TPU cores.
The Trainer parameters tpu_cores defines how many TPU cores to train on (1 or 8) / Single TPU to train on [1].
For Single TPU training, Just pass the TPU core ID [1-8] in a list.
Single TPU core training. Model will train on TPU core ID 5.
trainer = pl.Trainer(tpu_cores=[5])
8 TPU cores training. Model will train on 8 TPU cores.
trainer = pl.Trainer(tpu_cores=8)
Distributed Backend with TPU¶
The accelerator option used for GPUs does not apply to TPUs.
TPUs work in DDP mode by default (distributing over each core)
TPU Pod¶
To train on more than 8 cores, your code actually doesn’t change! All you need to do is submit the following command:
$ python -m torch_xla.distributed.xla_dist
--tpu=$TPU_POD_NAME
--conda-env=torch-xla-nightly
-- python /usr/share/torch-xla-0.5/pytorch/xla/test/test_train_imagenet.py --fake_data
See this guide on how to set up the instance groups and VMs needed to run TPU Pods.
16 bit precision¶
Lightning also supports training in 16-bit precision with TPUs. By default, TPU training will use 32-bit precision. To enable 16-bit, set the 16-bit flag.
import pytorch_lightning as pl
my_model = MyLightningModule()
trainer = pl.Trainer(tpu_cores=8, precision=16)
trainer.fit(my_model)
Under the hood the xla library will use the bfloat16 type.
About XLA¶
XLA is the library that interfaces PyTorch with the TPUs. For more information check out XLA.
Guide for troubleshooting XLA
Test set¶
Lightning forces the user to run the test set separately to make sure it isn’t evaluated by mistake.
Testing is performed using the trainer object’s .test() method.
-
Trainer.test(model=None, test_dataloaders=None, ckpt_path='best', verbose=True, datamodule=None)[source] Separates from fit to make sure you never run on your test set until you want to.
- Parameters
ckpt_path¶ (
Optional[str]) – Eitherbestor path to the checkpoint you wish to test. IfNone, use the weights from the last epoch to test. Default tobest.datamodule¶ (
Optional[LightningDataModule]) – A instance ofLightningDataModule.model¶ (
Optional[LightningModule]) – The model to test.test_dataloaders¶ (
Union[DataLoader,List[DataLoader],None]) – Either a single Pytorch Dataloader or a list of them, specifying validation samples.
- Returns
The final test result dictionary. If no test_epoch_end is defined returns a list of dictionaries
Test after fit¶
To run the test set after training completes, use this method.
# run full training
trainer.fit(model)
# (1) load the best checkpoint automatically (lightning tracks this for you)
trainer.test()
# (2) don't load a checkpoint, instead use the model with the latest weights
trainer.test(ckpt_path=None)
# (3) test using a specific checkpoint
trainer.test(ckpt_path='/path/to/my_checkpoint.ckpt')
# (4) test with an explicit model (will use this model and not load a checkpoint)
trainer.test(model)
Test multiple models¶
You can run the test set on multiple models using the same trainer instance.
model1 = LitModel()
model2 = GANModel()
trainer = Trainer()
trainer.test(model1)
trainer.test(model2)
Test pre-trained model¶
To run the test set on a pre-trained model, use this method.
model = MyLightningModule.load_from_checkpoint(
checkpoint_path='/path/to/pytorch_checkpoint.ckpt',
hparams_file='/path/to/test_tube/experiment/version/hparams.yaml',
map_location=None
)
# init trainer with whatever options
trainer = Trainer(...)
# test (pass in the model)
trainer.test(model)
In this case, the options you pass to trainer will be used when running the test set (ie: 16-bit, dp, ddp, etc…)
Test with additional data loaders¶
You can still run inference on a test set even if the test_dataloader method hasn’t been defined within your LightningModule instance. This would be the case when your test data is not available at the time your model was declared.
# setup your data loader
test = DataLoader(...)
# test (pass in the loader)
trainer.test(test_dataloaders=test)
You can either pass in a single dataloader or a list of them. This optional named parameter can be used in conjunction with any of the above use cases. Additionally, you can also pass in an LightningDataModule that have overridden the test_dataloader method.
class MyDataModule(pl.LightningDataModule):
...
def test_dataloader(self):
return DataLoader(...)
# setup your datamodule
dm = MyDataModule(...)
# test (pass in datamodule)
trainer.test(datamodule=dm)
Inference in Production¶
PyTorch Lightning eases the process of deploying models into production.
Exporting to ONNX¶
PyTorch Lightning provides a handy function to quickly export your model to ONNX format, which allows the model to be independent of PyTorch and run on an ONNX Runtime.
To export your model to ONNX format call the to_onnx function on your Lightning Module with the filepath and input_sample.
filepath = 'model.onnx'
model = SimpleModel()
input_sample = torch.randn((1, 64))
model.to_onnx(filepath, input_sample, export_params=True)
You can also skip passing the input sample if the example_input_array property is specified in your LightningModule.
Once you have the exported model, you can run it on your ONNX runtime in the following way:
ort_session = onnxruntime.InferenceSession(filepath)
input_name = ort_session.get_inputs()[0].name
ort_inputs = {input_name: np.random.randn(1, 64).astype(np.float32)}
ort_outs = ort_session.run(None, ort_inputs)
Exporting to TorchScript¶
TorchScript allows you to serialize your models in a way that it can be loaded in non-Python environments.
The LightningModule has a handy method to_torchscript()
that returns a scripted module which you can save or directly use.
model = SimpleModel()
script = model.to_torchscript()
# save for use in production environment
torch.jit.save(script, "model.pt")
It is recommended that you install the latest supported version of PyTorch to use this feature without limitations.
Conversational AI¶
These are amazing ecosystems to help with Automatic Speech Recognition (ASR), Natural Language Processing (NLP), and Text to speech (TTS).
NeMo¶
NVIDIA NeMo is a toolkit for building new State-of-the-Art Conversational AI models. NeMo has separate collections for Automatic Speech Recognition (ASR), Natural Language Processing (NLP), and Text-to-Speech (TTS) models. Each collection consists of prebuilt modules that include everything needed to train on your data. Every module can easily be customized, extended, and composed to create new Conversational AI model architectures.
Conversational AI architectures are typically very large and require a lot of data and compute for training. NeMo uses PyTorch Lightning for easy and performant multi-GPU/multi-node mixed-precision training.
Note
Every NeMo model is a LightningModule that comes equipped with all supporting infrastructure for training and reproducibility.
NeMo Models¶
NeMo Models contain everything needed to train and reproduce state of the art Conversational AI research and applications, including:
neural network architectures
datasets/data loaders
data preprocessing/postprocessing
data augmentors
optimizers and schedulers
tokenizers
language models
NeMo uses Hydra for configuring both NeMo models and the PyTorch Lightning Trainer. Depending on the domain and application, many different AI libraries will have to be configured to build the application. Hydra makes it easy to bring all of these libraries together so that each can be configured from .yaml or the Hydra CLI.
Note
Every NeMo model has an example configuration file and a corresponding script that contains all configurations needed for training.
The end result of using NeMo, Pytorch Lightning, and Hydra is that NeMo models all have the same look and feel. This makes it easy to do Conversational AI research across multiple domains. NeMo models are also fully compatible with the PyTorch ecosystem.
Installing NeMo¶
Before installing NeMo, please install Cython first.
pip install Cython
For ASR and TTS models, also install these linux utilities.
apt-get update && apt-get install -y libsndfile1 ffmpeg
Then installing the latest NeMo release is a simple pip install.
pip install nemo_toolkit[all]==1.0.0b1
To install the main branch from GitHub:
python -m pip install git+https://github.com/NVIDIA/NeMo.git@main#egg=nemo_toolkit[all]
To install from a local clone of NeMo:
./reinstall.sh # from cloned NeMo's git root
For Docker users, the NeMo container is available on NGC.
docker pull nvcr.io/nvidia/nemo:v1.0.0b1
docker run --runtime=nvidia -it --rm -v --shm-size=8g -p 8888:8888 -p 6006:6006 --ulimit memlock=-1 --ulimit stack=67108864 nvcr.io/nvidia/nemo:v1.0.0b1
Experiment Manager¶
NeMo’s Experiment Manager leverages PyTorch Lightning for model checkpointing, TensorBoard Logging, and Weights and Biases logging. The Experiment Manager is included by default in all NeMo example scripts.
exp_manager(trainer, cfg.get("exp_manager", None))
And is configurable via .yaml with Hydra.
exp_manager:
exp_dir: null
name: *name
create_tensorboard_logger: True
create_checkpoint_callback: True
Optionally launch Tensorboard to view training results in ./nemo_experiments (by default).
tensorboard --bind_all --logdir nemo_experiments
Automatic Speech Recognition (ASR)¶
Everything needed to train Convolutional ASR models is included with NeMo. NeMo supports multiple Speech Recognition architectures, including Jasper and QuartzNet. NeMo Speech Models can be trained from scratch on custom datasets or fine-tuned using pre-trained checkpoints trained on thousands of hours of audio that can be restored for immediate use.
Some typical ASR tasks are included with NeMo:
See this asr notebook for a full tutorial on doing ASR with NeMo, PyTorch Lightning, and Hydra.
Specify ASR Model Configurations with YAML File¶
NeMo Models and the PyTorch Lightning Trainer can be fully configured from .yaml files using Hydra.
See this asr config for the entire speech to text .yaml file.
# configure the PyTorch Lightning Trainer
trainer:
gpus: 0 # number of gpus
max_epochs: 5
max_steps: null # computed at runtime if not set
num_nodes: 1
distributed_backend: ddp
...
# configure the ASR model
model:
...
encoder:
cls: nemo.collections.asr.modules.ConvASREncoder
params:
feat_in: *n_mels
activation: relu
conv_mask: true
jasper:
- filters: 128
repeat: 1
kernel: [11]
stride: [1]
dilation: [1]
dropout: *dropout
...
# all other configuration, data, optimizer, preprocessor, etc
...
Developing ASR Model From Scratch¶
# hydra_runner calls hydra.main and is useful for multi-node experiments
@hydra_runner(config_path="conf", config_name="config")
def main(cfg):
trainer = Trainer(**cfg.trainer)
asr_model = EncDecCTCModel(cfg.model, trainer)
trainer.fit(asr_model)
Hydra makes every aspect of the NeMo model, including the PyTorch Lightning Trainer, customizable from the command line.
python NeMo/examples/asr/speech_to_text.py --config-name=quartznet_15x5 \
trainer.gpus=4 \
trainer.max_epochs=128 \
+trainer.precision=16 \
model.train_ds.manifest_filepath=<PATH_TO_DATA>/librispeech-train-all.json \
model.validation_ds.manifest_filepath=<PATH_TO_DATA>/librispeech-dev-other.json \
model.train_ds.batch_size=64 \
+model.validation_ds.num_workers=16 \
+model.train_ds.num_workers=16
Note
Training NeMo ASR models can take days/weeks so it is highly recommended to use multiple GPUs and multiple nodes with the PyTorch Lightning Trainer.
Using State-Of-The-Art Pre-trained ASR Model¶
Transcribe audio with QuartzNet model pretrained on ~3300 hours of audio.
quartznet = EncDecCTCModel.from_pretrained('QuartzNet15x5Base-En')
files = ['path/to/my.wav'] # file duration should be less than 25 seconds
for fname, transcription in zip(files, quartznet.transcribe(paths2audio_files=files)):
print(f"Audio in {fname} was recognized as: {transcription}")
To see the available pretrained checkpoints:
EncDecCTCModel.list_available_models()
NeMo ASR Model Under the Hood¶
Any aspect of ASR training or model architecture design can easily be customized with PyTorch Lightning since every NeMo model is a Lightning Module.
class EncDecCTCModel(ASRModel):
"""Base class for encoder decoder CTC-based models."""
...
@typecheck()
def forward(self, input_signal, input_signal_length):
processed_signal, processed_signal_len = self.preprocessor(
input_signal=input_signal, length=input_signal_length,
)
# Spec augment is not applied during evaluation/testing
if self.spec_augmentation is not None and self.training:
processed_signal = self.spec_augmentation(input_spec=processed_signal)
encoded, encoded_len = self.encoder(audio_signal=processed_signal, length=processed_signal_len)
log_probs = self.decoder(encoder_output=encoded)
greedy_predictions = log_probs.argmax(dim=-1, keepdim=False)
return log_probs, encoded_len, greedy_predictions
# PTL-specific methods
def training_step(self, batch, batch_nb):
audio_signal, audio_signal_len, transcript, transcript_len = batch
log_probs, encoded_len, predictions = self.forward(
input_signal=audio_signal, input_signal_length=audio_signal_len
)
loss_value = self.loss(
log_probs=log_probs, targets=transcript, input_lengths=encoded_len, target_lengths=transcript_len
)
wer_num, wer_denom = self._wer(predictions, transcript, transcript_len)
tensorboard_logs = {
'train_loss': loss_value,
'training_batch_wer': wer_num / wer_denom,
'learning_rate': self._optimizer.param_groups[0]['lr'],
}
return {'loss': loss_value, 'log': tensorboard_logs}
Neural Types in NeMo ASR¶
NeMo Models and Neural Modules come with Neural Type checking. Neural type checking is extremely useful when combining many different neural network architectures for a production-grade application.
@property
def input_types(self) -> Optional[Dict[str, NeuralType]]:
if hasattr(self.preprocessor, '_sample_rate'):
audio_eltype = AudioSignal(freq=self.preprocessor._sample_rate)
else:
audio_eltype = AudioSignal()
return {
"input_signal": NeuralType(('B', 'T'), audio_eltype),
"input_signal_length": NeuralType(tuple('B'), LengthsType()),
}
@property
def output_types(self) -> Optional[Dict[str, NeuralType]]:
return {
"outputs": NeuralType(('B', 'T', 'D'), LogprobsType()),
"encoded_lengths": NeuralType(tuple('B'), LengthsType()),
"greedy_predictions": NeuralType(('B', 'T'), LabelsType()),
}
Natural Language Processing (NLP)¶
Everything needed to finetune BERT-like language models for NLP tasks is included with NeMo. NeMo NLP Models include HuggingFace Transformers and NVIDIA Megatron-LM BERT and Bio-Megatron models. NeMo can also be used for pretraining BERT-based language models from HuggingFace.
Any of the HuggingFace encoders or Megatron-LM encoders can easily be used for the NLP tasks that are included with NeMo:
Text Classification (including Sentiment Analysis)
Token Classification (including Named Entity Recognition)
Named Entity Recognition (NER)¶
NER (or more generally token classification) is the NLP task of detecting and classifying key information (entities) in text. This task is very popular in Healthcare and Finance. In finance, for example, it can be important to identify geographical, geopolitical, organizational, persons, events, and natural phenomenon entities. See this NER notebook for a full tutorial on doing NER with NeMo, PyTorch Lightning, and Hydra.
Specify NER Model Configurations with YAML File¶
Note
NeMo Models and the PyTorch Lightning Trainer can be fully configured from .yaml files using Hydra.
See this token classification config for the entire NER (token classification) .yaml file.
# configure any argument of the PyTorch Lightning Trainer
trainer:
gpus: 1 # the number of gpus, 0 for CPU
num_nodes: 1
max_epochs: 5
...
# configure any aspect of the token classification model here
model:
dataset:
data_dir: ??? # /path/to/data
class_balancing: null # choose from [null, weighted_loss]. Weighted_loss enables the weighted class balancing of the loss, may be used for handling unbalanced classes
max_seq_length: 128
...
tokenizer:
tokenizer_name: ${model.language_model.pretrained_model_name} # or sentencepiece
vocab_file: null # path to vocab file
...
# the language model can be from HuggingFace or Megatron-LM
language_model:
pretrained_model_name: bert-base-uncased
lm_checkpoint: null
...
# the classifier for the downstream task
head:
num_fc_layers: 2
fc_dropout: 0.5
activation: 'relu'
...
# all other configuration: train/val/test/ data, optimizer, experiment manager, etc
...
Developing NER Model From Scratch¶
# hydra_runner calls hydra.main and is useful for multi-node experiments
@hydra_runner(config_path="conf", config_name="token_classification_config")
def main(cfg: DictConfig) -> None:
trainer = pl.Trainer(**cfg.trainer)
model = TokenClassificationModel(cfg.model, trainer=trainer)
trainer.fit(model)
After training, we can do inference with the saved NER model using PyTorch Lightning.
Inference from file:
gpu = 1 if cfg.trainer.gpus != 0 else 0
trainer = pl.Trainer(gpus=gpu)
model.set_trainer(trainer)
model.evaluate_from_file(
text_file=os.path.join(cfg.model.dataset.data_dir, cfg.model.validation_ds.text_file),
labels_file=os.path.join(cfg.model.dataset.data_dir, cfg.model.validation_ds.labels_file),
output_dir=exp_dir,
add_confusion_matrix=True,
normalize_confusion_matrix=True,
)
Or we can run inference on a few examples:
queries = ['we bought four shirts from the nvidia gear store in santa clara.', 'Nvidia is a company in Santa Clara.']
results = model.add_predictions(queries)
for query, result in zip(queries, results):
logging.info(f'Query : {query}')
logging.info(f'Result: {result.strip()}\n')
Hydra makes every aspect of the NeMo model, including the PyTorch Lightning Trainer, customizable from the command line.
python token_classification.py \
model.language_model.pretrained_model_name=bert-base-cased \
model.head.num_fc_layers=2 \
model.dataset.data_dir=/path/to/my/data \
trainer.max_epochs=5 \
trainer.gpus=[0,1]
Tokenizers¶
Tokenization is the process of converting natural language text into integer arrays which can be used for machine learning. For NLP tasks, tokenization is an essential part of data preprocessing. NeMo supports all BERT-like model tokenizers from HuggingFace’s AutoTokenizer and also supports Google’s SentencePieceTokenizer which can be trained on custom data.
To see the list of supported tokenizers:
from nemo.collections import nlp as nemo_nlp
nemo_nlp.modules.get_tokenizer_list()
See this tokenizer notebook for a full tutorial on using tokenizers in NeMo.
Language Models¶
Language models are used to extract information from (tokenized) text. Much of the state-of-the-art in natural language processing is achieved by fine-tuning pretrained language models on the downstream task.
With NeMo, you can either pretrain a BERT model on your data or use a pretrained language model from HuggingFace Transformers or NVIDIA Megatron-LM.
To see the list of language models available in NeMo:
nemo_nlp.modules.get_pretrained_lm_models_list(include_external=True)
Easily switch between any language model in the above list by using .get_lm_model.
nemo_nlp.modules.get_lm_model(pretrained_model_name='distilbert-base-uncased')
See this language model notebook for a full tutorial on using pretrained language models in NeMo.
Using a Pre-trained NER Model¶
NeMo has pre-trained NER models that can be used to get started with Token Classification right away. Models are automatically downloaded from NGC, cached locally to disk, and loaded into GPU memory using the .from_pretrained method.
# load pre-trained NER model
pretrained_ner_model = TokenClassificationModel.from_pretrained(model_name="NERModel")
# define the list of queries for inference
queries = [
'we bought four shirts from the nvidia gear store in santa clara.',
'Nvidia is a company.',
'The Adventures of Tom Sawyer by Mark Twain is an 1876 novel about a young boy growing '
+ 'up along the Mississippi River.',
]
results = pretrained_ner_model.add_predictions(queries)
for query, result in zip(queries, results):
print()
print(f'Query : {query}')
print(f'Result: {result.strip()}\n')
NeMo NER Model Under the Hood¶
Any aspect of NLP training or model architecture design can easily be customized with PyTorch Lightning since every NeMo model is a Lightning Module.
class TokenClassificationModel(ModelPT):
"""
Token Classification Model with BERT, applicable for tasks such as Named Entity Recognition
"""
...
@typecheck()
def forward(self, input_ids, token_type_ids, attention_mask):
hidden_states = self.bert_model(
input_ids=input_ids, token_type_ids=token_type_ids, attention_mask=attention_mask
)
logits = self.classifier(hidden_states=hidden_states)
return logits
# PTL-specfic methods
def training_step(self, batch, batch_idx):
"""
Lightning calls this inside the training loop with the data from the training dataloader
passed in as `batch`.
"""
input_ids, input_type_ids, input_mask, subtokens_mask, loss_mask, labels = batch
logits = self(input_ids=input_ids, token_type_ids=input_type_ids, attention_mask=input_mask)
loss = self.loss(logits=logits, labels=labels, loss_mask=loss_mask)
tensorboard_logs = {'train_loss': loss, 'lr': self._optimizer.param_groups[0]['lr']}
return {'loss': loss, 'log': tensorboard_logs}
...
Neural Types in NeMo NLP¶
NeMo Models and Neural Modules come with Neural Type checking. Neural type checking is extremely useful when combining many different neural network architectures for a production-grade application.
@property
def input_types(self) -> Optional[Dict[str, NeuralType]]:
return self.bert_model.input_types
@property
def output_types(self) -> Optional[Dict[str, NeuralType]]:
return self.classifier.output_types
Text-To-Speech (TTS)¶
Everything needed to train TTS models and generate audio is included with NeMo. NeMo TTS Models can be trained from scratch on your own data or pretrained models can be downloaded automatically. NeMo currently supports a two step inference procedure. First, a model is used to generate a mel spectrogram from text. Second, a model is used to generate audio from a mel spectrogram.
Mel Spectrogram Generators:
Audio Generators:
Griffin-Lim
Specify TTS Model Configurations with YAML File¶
Note
NeMo Models and PyTorch Lightning Trainer can be fully configured from .yaml files using Hydra.
# configure the PyTorch Lightning Trainer
trainer:
gpus: -1 # number of gpus
max_epochs: 350
num_nodes: 1
distributed_backend: ddp
...
# configure the TTS model
model:
...
encoder:
cls: nemo.collections.tts.modules.glow_tts.TextEncoder
params:
n_vocab: 148
out_channels: *n_mels
hidden_channels: 192
filter_channels: 768
filter_channels_dp: 256
...
# all other configuration, data, optimizer, parser, preprocessor, etc
...
Developing TTS Model From Scratch¶
# hydra_runner calls hydra.main and is useful for multi-node experiments
@hydra_runner(config_path="conf", config_name="glow_tts")
def main(cfg):
trainer = pl.Trainer(**cfg.trainer)
model = GlowTTSModel(cfg=cfg.model, trainer=trainer)
trainer.fit(model)
Hydra makes every aspect of the NeMo model, including the PyTorch Lightning Trainer, customizable from the command line.
python NeMo/examples/tts/glow_tts.py \
trainer.gpus=4 \
trainer.max_epochs=400 \
...
train_dataset=/path/to/train/data \
validation_datasets=/path/to/val/data \
model.train_ds.batch_size = 64 \
Note
Training NeMo TTS models from scratch can take days or weeks so it is highly recommended to use multiple GPUs and multiple nodes with the PyTorch Lightning Trainer.
Using State-Of-The-Art Pre-trained TTS Model¶
Generate speech using models trained on LJSpeech <https://keithito.com/LJ-Speech-Dataset/>, around 24 hours of single speaker data.
See this TTS notebook for a full tutorial on generating speech with NeMo, PyTorch Lightning, and Hydra.
# load pretrained spectrogram model
spec_gen = SpecModel.from_pretrained('GlowTTS-22050Hz').cuda()
# load pretrained Generators
vocoder = WaveGlowModel.from_pretrained('WaveGlow-22050Hz').cuda()
def infer(spec_gen_model, vocder_model, str_input):
with torch.no_grad():
parsed = spec_gen.parse(text_to_generate)
spectrogram = spec_gen.generate_spectrogram(tokens=parsed)
audio = vocoder.convert_spectrogram_to_audio(spec=spectrogram)
if isinstance(spectrogram, torch.Tensor):
spectrogram = spectrogram.to('cpu').numpy()
if len(spectrogram.shape) == 3:
spectrogram = spectrogram[0]
if isinstance(audio, torch.Tensor):
audio = audio.to('cpu').numpy()
return spectrogram, audio
text_to_generate = input("Input what you want the model to say: ")
spec, audio = infer(spec_gen, vocoder, text_to_generate)
To see the available pretrained checkpoints:
# spec generator
GlowTTSModel.list_available_models()
# vocoder
WaveGlowModel.list_available_models()
NeMo TTS Model Under the Hood¶
Any aspect of TTS training or model architecture design can easily be customized with PyTorch Lightning since every NeMo model is a LightningModule.
class GlowTTSModel(SpectrogramGenerator):
"""
GlowTTS model used to generate spectrograms from text
Consists of a text encoder and an invertible spectrogram decoder
"""
...
# NeMo models come with neural type checking
@typecheck(
input_types={
"x": NeuralType(('B', 'T'), TokenIndex()),
"x_lengths": NeuralType(('B'), LengthsType()),
"y": NeuralType(('B', 'D', 'T'), MelSpectrogramType(), optional=True),
"y_lengths": NeuralType(('B'), LengthsType(), optional=True),
"gen": NeuralType(optional=True),
"noise_scale": NeuralType(optional=True),
"length_scale": NeuralType(optional=True),
}
)
def forward(self, *, x, x_lengths, y=None, y_lengths=None, gen=False, noise_scale=0.3, length_scale=1.0):
if gen:
return self.glow_tts.generate_spect(
text=x, text_lengths=x_lengths, noise_scale=noise_scale, length_scale=length_scale
)
else:
return self.glow_tts(text=x, text_lengths=x_lengths, spect=y, spect_lengths=y_lengths)
...
def step(self, y, y_lengths, x, x_lengths):
z, y_m, y_logs, logdet, logw, logw_, y_lengths, attn = self(
x=x, x_lengths=x_lengths, y=y, y_lengths=y_lengths, gen=False
)
l_mle, l_length, logdet = self.loss(
z=z,
y_m=y_m,
y_logs=y_logs,
logdet=logdet,
logw=logw,
logw_=logw_,
x_lengths=x_lengths,
y_lengths=y_lengths,
)
loss = sum([l_mle, l_length])
return l_mle, l_length, logdet, loss, attn
# PTL-specfic methods
def training_step(self, batch, batch_idx):
y, y_lengths, x, x_lengths = batch
y, y_lengths = self.preprocessor(input_signal=y, length=y_lengths)
l_mle, l_length, logdet, loss, _ = self.step(y, y_lengths, x, x_lengths)
output = {
"loss": loss, # required
"progress_bar": {"l_mle": l_mle, "l_length": l_length, "logdet": logdet},
"log": {"loss": loss, "l_mle": l_mle, "l_length": l_length, "logdet": logdet},
}
return output
...
Neural Types in NeMo TTS¶
NeMo Models and Neural Modules come with Neural Type checking. Neural type checking is extremely useful when combining many different neural network architectures for a production-grade application.
@typecheck(
input_types={
"x": NeuralType(('B', 'T'), TokenIndex()),
"x_lengths": NeuralType(('B'), LengthsType()),
"y": NeuralType(('B', 'D', 'T'), MelSpectrogramType(), optional=True),
"y_lengths": NeuralType(('B'), LengthsType(), optional=True),
"gen": NeuralType(optional=True),
"noise_scale": NeuralType(optional=True),
"length_scale": NeuralType(optional=True),
}
)
def forward(self, *, x, x_lengths, y=None, y_lengths=None, gen=False, noise_scale=0.3, length_scale=1.0):
...
Learn More¶
Watch the NVIDIA NeMo Intro Video
Watch the PyTorch Lightning and NVIDIA NeMo Discussion Video
Visit the NVIDIA NeMo Developer Website
Read the NVIDIA NeMo PyTorch Blog
Download pre-trained ASR, NLP, and TTS models on NVIDIA NGC to quickly get started with NeMo.
Become an expert on Building Conversational AI applications with our tutorials, and example scripts,
See our developer guide for more information on core NeMo concepts, ASR/NLP/TTS collections, and the NeMo API.
Note
NeMo tutorial notebooks can be run on Google Colab.
NVIDIA NeMo is actively being developed on GitHub. Contributions are welcome!
Contributor Covenant Code of Conduct¶
Our Pledge¶
In the interest of fostering an open and welcoming environment, we as contributors and maintainers pledge to making participation in our project and our community a harassment-free experience for everyone, regardless of age, body size, disability, ethnicity, sex characteristics, gender identity and expression, level of experience, education, socio-economic status, nationality, personal appearance, race, religion, or sexual identity and orientation.
Our Standards¶
Examples of behavior that contributes to creating a positive environment include:
Using welcoming and inclusive language
Being respectful of differing viewpoints and experiences
Gracefully accepting constructive criticism
Focusing on what is best for the community
Showing empathy towards other community members
Examples of unacceptable behavior by participants include:
The use of sexualized language or imagery and unwelcome sexual attention or advances
Trolling, insulting/derogatory comments, and personal or political attacks
Public or private harassment
Publishing others’ private information, such as a physical or electronic address, without explicit permission
Other conduct which could reasonably be considered inappropriate in a professional setting
Our Responsibilities¶
Project maintainers are responsible for clarifying the standards of acceptable behavior and are expected to take appropriate and fair corrective action in response to any instances of unacceptable behavior.
Project maintainers have the right and responsibility to remove, edit, or reject comments, commits, code, wiki edits, issues, and other contributions that are not aligned to this Code of Conduct, or to ban temporarily or permanently any contributor for other behaviors that they deem inappropriate, threatening, offensive, or harmful.
Scope¶
This Code of Conduct applies both within project spaces and in public spaces when an individual is representing the project or its community. Examples of representing a project or community include using an official project e-mail address, posting via an official social media account, or acting as an appointed representative at an online or offline event. Representation of a project may be further defined and clarified by project maintainers.
Enforcement¶
Instances of abusive, harassing, or otherwise unacceptable behavior may be reported by contacting the project team at waf2107@columbia.edu. All complaints will be reviewed and investigated and will result in a response that is deemed necessary and appropriate to the circumstances. The project team is obligated to maintain confidentiality with regard to the reporter of an incident. Further details of specific enforcement policies may be posted separately.
Project maintainers who do not follow or enforce the Code of Conduct in good faith may face temporary or permanent repercussions as determined by other members of the project’s leadership.
Attribution¶
This Code of Conduct is adapted from the Contributor Covenant, version 1.4, available at https://www.contributor-covenant.org/version/1/4/code-of-conduct.html
For answers to common questions about this code of conduct, see https://www.contributor-covenant.org/faq
Contributing¶
Welcome to the PyTorch Lightning community! We’re building the most advanced research platform on the planet to implement the latest, best practices that the amazing PyTorch team rolls out!
Main Core Value: One less thing to remember¶
Simplify the API as much as possible from the user perspective. Any additions or improvements should minimize the things the user needs to remember.
For example: One benefit of the validation_step is that the user doesn’t have to remember to set the model to .eval(). This helps users avoid all sorts of subtle errors.
Lightning Design Principles¶
We encourage all sorts of contributions you’re interested in adding! When coding for lightning, please follow these principles.
No PyTorch Interference¶
We don’t want to add any abstractions on top of pure PyTorch. This gives researchers all the control they need without having to learn yet another framework.
Simple Internal Code¶
It’s useful for users to look at the code and understand very quickly what’s happening. Many users won’t be engineers. Thus we need to value clear, simple code over condensed ninja moves. While that’s super cool, this isn’t the project for that :)
Force User Decisions To Best Practices¶
There are 1,000 ways to do something. However, eventually one popular solution becomes standard practice, and everyone follows. We try to find the best way to solve a particular problem, and then force our users to use it for readability and simplicity. A good example is accumulated gradients. There are many different ways to implement it, we just pick one and force users to use it. A bad forced decision would be to make users use a specific library to do something.
When something becomes a best practice, we add it to the framework. This is usually something like bits of code in utils or in the model file that everyone keeps adding over and over again across projects. When this happens, bring that code inside the trainer and add a flag for it.
Simple External API¶
What makes sense to you may not make sense to others. When creating an issue with an API change suggestion, please validate that it makes sense for others. Treat code changes the way you treat a startup: validate that it’s a needed feature, then add if it makes sense for many people.
Backward-compatible API¶
We all hate updating our deep learning packages because we don’t want to refactor a bunch of stuff. In Lightning, we make sure every change we make which could break an API is backward compatible with good deprecation warnings.
You shouldn’t be afraid to upgrade Lightning :)
Gain User Trust¶
As a researcher, you can’t have any part of your code going wrong. So, make thorough tests to ensure that every implementation of a new trick or subtle change is correct.
Interoperability¶
Have a favorite feature from other libraries like fast.ai or transformers? Those should just work with lightning as well. Grab your favorite model or learning rate scheduler from your favorite library and run it in Lightning.
Contribution Types¶
We are always looking for help implementing new features or fixing bugs.
A lot of good work has already been done in project mechanics (requirements.txt, setup.py, pep8, badges, ci, etc…) so we’re in a good state there thanks to all the early contributors (even pre-beta release)!
Bug Fixes:¶
If you find a bug please submit a github issue.
Make sure the title explains the issue.
Describe your setup, what you are trying to do, expected vs. actual behaviour. Please add configs and code samples.
Add details on how to reproduce the issue - a minimal test case is always best, colab is also great. Note, that the sample code shall be minimal and if needed with publicly available data.
Try to fix it or recommend a solution. We highly recommend to use test-driven approach:
Convert your minimal code example to a unit/integration test with assert on expected results.
Start by debugging the issue… You can run just this particular test in your IDE and draft a fix.
Verify that your test case fails on the master branch and only passes with the fix applied.
Submit a PR!
Note, even if you do not find the solution, sending a PR with a test covering the issue is a valid contribution and we can help you or finish it with you :]
New Features:¶
Submit a github issue - describe what is the motivation of such feature (adding the use case or an example is helpful).
Let’s discuss to determine the feature scope.
Submit a PR! We recommend test driven approach to adding new features as well:
Write a test for the functionality you want to add.
Write the functional code until the test passes.
Add/update the relevant tests!
This PR is a good example for adding a new metric, and this one for a new logger.
Test cases:¶
Want to keep Lightning healthy? Love seeing those green tests? So do we! How to we keep it that way? We write tests! We value tests contribution even more than new features.
Most of the tests in PyTorch Lightning train a trial MNIST model under various trainer conditions (ddp, ddp2+amp, etc…). The tests expect the model to perform to a reasonable degree of testing accuracy to pass. Want to add a new test case and not sure how? Talk to us!
Guidelines¶
Developments scripts¶
To build the documentation locally, simply execute the following commands from project root (only for Unix):
make cleancleans repo from temp/generated filesmake docsbuilds documentation under docs/build/htmlmake testruns all project’s tests
Original code¶
All added or edited code shall be the own original work of the particular contributor.
If you use some third-party implementation, all such blocks/functions/modules shall be properly referred and if possible also agreed by code’s author. For example - This code is inspired from http://....
In case you adding new dependencies, make sure that they are compatible with the actual PyTorch Lightning license (ie. dependencies should be at least as permissive as the PyTorch Lightning license).
Coding Style¶
Use f-strings for output formation (except logging when we stay with lazy
logging.info("Hello %s!", name).Black code formatter is used using a
pre-commithook.
Documentation¶
We are using Sphinx with Napoleon extension. Moreover, we set Google style to follow with type convention.
See following short example of a sample function taking one position string and optional
from typing import Optional
def my_func(param_a: int, param_b: Optional[float] = None) -> str:
"""Sample function.
Args:
param_a: first parameter
param_b: second parameter
Return:
sum of both numbers
Example:
Sample doctest example...
>>> my_func(1, 2)
3
.. note:: If you want to add something.
"""
p = param_b if param_b else 0
return str(param_a + p)
When updating the docs make sure to build them first locally and visually inspect the html files (in the browser) for formatting errors. In certain cases, a missing blank line or a wrong indent can lead to a broken layout. Run these commands
pip install -r requirements/docs.txt
cd docs
make html
and open docs/build/html/index.html in your browser.
Notes:
You need to have LaTeX installed for rendering math equations. You can for example install TeXLive by doing one of the following:
on Ubuntu (Linux) run
apt-get install texliveor otherwise follow the instructions on the TeXLive websiteuse the RTD docker image
with PL used class meta you need to use python 3.7 or higher
When you send a PR the continuous integration will run tests and build the docs. You can access a preview of the html pages in the Artifacts tab in CircleCI when you click on the task named ci/circleci: Build-Docs at the bottom of the PR page.
Testing¶
Local: Testing your work locally will help you speed up the process since it allows you to focus on particular (failing) test-cases. To setup a local development environment, install both local and test dependencies:
python -m pip install ".[dev, examples]"
python -m pip install pre-commit
You can run the full test-case in your terminal via this make script:
make test
Note: if your computer does not have multi-GPU nor TPU these tests are skipped.
GitHub Actions: For convenience, you can also use your own GHActions building which will be triggered with each commit. This is useful if you do not test against all required dependency versions.
Docker: Another option is utilize the pytorch lightning cuda base docker image. You can then run:
python -m pytest pytorch_lightning tests pl_examples -v --flake8
Pull Request¶
We welcome any useful contribution! For your convenience here’s a recommended workflow:
Think about what you want to do - fix a bug, repair docs, etc. If you want to implement a new feature or enhance an existing one, start by opening a GitHub issue to explain the feature and the motivation. Members from core-contributors will take a look (it might take some time - we are often overloaded with issues!) and discuss it. Once an agreement was reached - start coding.
Start your work locally (usually until you need our CI testing).
Create a branch and prepare your changes.
Tip: do not work with your master directly, it may become complicated when you need to rebase.
Tip: give your PR a good name! It will be useful later when you may work on multiple tasks/PRs.
Test your code!
It is always good practice to start coding by creating a test case, verifying it breaks with current behaviour, and passes with your new changes.
Make sure your new tests cover all different edge cases.
Make sure all exceptions are handled.
Create a “Draft PR” which is clearly marked, to let us know you don’t need feedback yet.
When you feel ready for integrating your work, mark your PR “Ready for review”.
Your code should be readable and follow the project’s design principles.
Make sure all tests are passing.
Make sure you add a GitHub issue to your PR.
Use tags in PR name for following cases:
[blocked by #
] if you work is depending on others changes.[wip] when you start to re-edit your work, mark it so no one will accidentally merge it in meantime.
Question & Answer¶
How can I help/contribute?¶
All types of contributions are welcome - reporting bugs, fixing documentation, adding test cases, solving issues, and preparing bug fixes. To get started with code contributions, look for issues marked with the label good first issue or chose something close to your domain with the label help wanted. Before coding, make sure that the issue description is clear and comment on the issue so that we can assign it to you (or simply self-assign if you can).
Is there a recommendation for branch names?¶
We recommend you follow this convention <type>/<issue-id>_<short-name> where the types are: bugfix, feature, docs, or tests (but if you are using your own fork that’s optional).
How to rebase my PR?¶
We recommend creating a PR in a separate branch other than master, especially if you plan to submit several changes and do not want to wait until the first one is resolved (we can work on them in parallel).
First, make sure you have set upstream by running:
git remote add upstream https://github.com/PyTorchLightning/pytorch-lightning.git
You’ll know its set up right if you run git remote -v and see something similar to this:
origin https://github.com/{YOUR_USERNAME}/pytorch-lightning.git (fetch)
origin https://github.com/{YOUR_USERNAME}/pytorch-lightning.git (push)
upstream https://github.com/PyTorchLightning/pytorch-lightning.git (fetch)
upstream https://github.com/PyTorchLightning/pytorch-lightning.git (push)
Checkout your feature branch and rebase it with upstream’s master before pushing up your feature branch:
git fetch --all --prune
git rebase upstream/master
# follow git instructions to resolve conflicts
git push -f
How to add new tests?**¶
We are using pytest in Pytorch Lightning.
Here are tutorials:
(recommended) Visual Testing with pytest from JetBrains on YouTube
Effective Python Testing With Pytest article on realpython.com
Here is the process to create a new test
Optional: Follow tutorials !
Find a file in tests/ which match what you want to test. If none, create one.
Use this template to get started !
Use
BoringModel and derivates to test out your code.
# TEST SHOULD BE IN YOUR FILE: tests/..../...py
# TEST CODE TEMPLATE
# [OPTIONAL] pytest decorator
# @pytest.mark.skipif(not torch.cuda.is_available(), reason="test requires GPU machine")
def test_explain_what_is_being_tested(tmpdir):
"""
Test description about text reason to be
"""
# os.environ["PL_DEV_DEBUG"] = '1' # [OPTIONAL] When activated, you can use internal trainer.dev_debugger
class ExtendedModel(BoringModel):
...
model = ExtendedModel()
# BoringModel is a functional model. You might want to set methods to None to test your behaviour
# Example: model.training_step_end = None
trainer = Trainer(
default_root_dir=tmpdir, # will save everything within a tmpdir generated for this test
...
)
trainer.fit(model)
trainer.test() # [OPTIONAL]
# assert the behaviour is correct.
assert ...
run our/your test with
python -m pytest tests/..../...py::test_explain_what_is_being_tested --verbose --capture=no
How to contribute bugfixes/features?¶
Currently we have separate streams/branches for bugfixes/features and release from the default branch (master).
Bugfixes should land in this master branch and features should land in release/X.y-dev.
This means that when starting your contribution and creating a branch according to question 2) you should start this new branch from master or future release dev branch.
Later in PR creation also pay attention to properly set the target branch, usually the starting (base) and target branch are the same.
Note, that this flow may change after the 1.2 release as we will adjust releasing strategy.
How to fix PR with mixed base and target branches?¶
Sometimes you start your PR as a bug-fix but it turns out to be more of a feature (or the other way around). Do not panic, the solution is very straightforward and quite simple. All you need to do are these two steps in arbitrary order:
Ask someone from Core to change the base/target branch to the correct one
Rebase or cherry-pick your commits onto the correct base branch…
Let’s show how to deal with the git…
the sample case is moving a PR from master to release/1.2-dev assuming my branch name is my-branch
and the last true master commit is ccc111 and your first commit is mmm222.
Cherry-picking way
git checkout my-branch # create a local backup of your branch git checkout -b my-branch-backup # reset your branch to the correct base git reset release/1.2-dev --hard # ACTION: this step is much easier to do with IDE # so open one and cherry-pick your last commits from `my-branch-backup` # resolve all eventual conflict as the new base may contain different code # when all done, push back to the open PR git push -f
Rebasing way, see more about rebase onto usage
git checkout my-branch # rebase your commits on the correct branch git rebase --onto release/1.2-dev ccc111 # if there is no collision you shall see just success # eventually you would need to resolve collision and in such case follow the instruction in terminal # when all done, push back to the open PR git push -f
Bonus Workflow Tip¶
If you don’t want to remember all the commands above every time you want to push some code/setup a Lightning Dev environment on a new VM, you can set up bash aliases for some common commands. You can add these to one of your ~/.bashrc, ~/.zshrc, or ~/.bash_aliases files.
NOTE: Once you edit one of these files, remember to source it or restart your shell. (ex. source ~/.bashrc if you added these to your ~/.bashrc file).
plclone (){
git clone https://github.com/{YOUR_USERNAME}/pytorch-lightning.git
cd pytorch-lightning
git remote add upstream https://github.com/PyTorchLightning/pytorch-lightning.git
# This is just here to print out info about your remote upstream/origin
git remote -v
}
plfetch (){
git fetch --all --prune
git checkout master
git merge upstream/master
}
# Rebase your branch with upstream's master
# plrebase <your-branch-name>
plrebase (){
git checkout $@
git rebase master
}
Now, you can:
clone your fork and set up upstream by running
plclonefrom your terminalfetch upstream and update your local master branch with it by running
plfetchrebase your feature branch (after running
plfetch) by runningplrebase your-branch-name
How to become a core contributor¶
Thanks for your interest in joining the Lightning team! We’re a rapidly growing project which is poised to become the go-to framework for DL researchers! We’re currently recruiting for a team of 5 core maintainers.
As a core maintainer you will have a strong say in the direction of the project. Big changes will require a majority of maintainers to agree.
Code of conduct¶
First and foremost, you’ll be evaluated against these core values. Any code we commit or feature we add needs to align with those core values.
The bar for joining the team¶
Lightning is being used to solve really hard problems at the top AI labs in the world. As such, the bar for adding team members is extremely high. Candidates must have solid engineering skills, have a good eye for user experience, and must be a power user of Lightning and PyTorch.
With that said, the Lightning team will be diverse and a reflection of an inclusive AI community. You don’t have to be an engineer to contribute! Scientists with great usability intuition and PyTorch ninja skills are welcomed!
Responsibilities:¶
The responsibilities mainly revolve around 3 things.
Github issues¶
Here we want to help users have an amazing experience. These range from questions from new people getting into DL to questions from researchers about doing something esoteric with Lightning Often, these issues require some sort of bug fix, document clarification or new functionality to be scoped out.
To become a core member you must resolve at least 10 Github issues which align with the API design goals for Lightning. By the end of these 10 issues I should feel comfortable in the way you answer user questions Pleasant/helpful tone.
Can abstract from that issue or bug into functionality that might solve other related issues or makes the platform more flexible.
Don’t make users feel like they don’t know what they’re doing. We’re here to help and to make everyone’s experience delightful.
Pull requests¶
Here we need to ensure the code that enters Lightning is high quality. For each PR we need to:
Make sure code coverage does not decrease
Documents are updated
Code is elegant and simple
Code is NOT overly engineered or hard to read
Ask yourself, could a non-engineer understand what’s happening here?
Make sure new tests are written
Is this NECESSARY for Lightning? There are some PRs which are just purely about adding engineering complexity which have no place in Lightning. Guidance
Some other PRs are for people who are wanting to get involved and add something unnecessary. We do want their help though! So don’t approve the PR, but direct them to a Github issue that they might be interested in helping with instead!
To be considered for core contributor, please review 10 PRs and help the authors land it on master. Once you’ve finished the review, ping me for a sanity check. At the end of 10 PRs if your PR reviews are inline with expectations described above, then you can merge PRs on your own going forward, otherwise we’ll do a few more until we’re both comfortable :)
Project directions¶
There are some big decisions which the project must make. For these I expect core contributors to have something meaningful to add if it’s their area of expertise.
Diversity¶
Lightning should reflect the broader community it serves. As such we should have scientists/researchers from different fields contributing!
The first 5 core contributors will fit this profile. Thus if you overlap strongly with experiences and expertise as someone else on the team, you might have to wait until the next set of contributors are added.
Summary: Requirements to apply¶
The goal is to be inline with expectations for solving issues by the last one so you can do them on your own. If not, I might ask you to solve a few more specific ones.
Solve 10+ Github issues.
Create 5+ meaningful PRs which solves some reported issue - bug,
Perform 10+ PR reviews from other contributors.
If you want to be considered, ping me on Slack.
PyTorch Lightning Governance | Persons of interest¶
Leads¶
William Falcon (williamFalcon) (Lightning founder)
Jirka Borovec (Borda)
Ethan Harris (ethanwharris) (Torchbearer founder)
Matthew Painter (MattPainter01) (Torchbearer founder)
Justus Schock (justusschock) (Former Core Member PyTorch Ignite)
Core Maintainers¶
Nic Eggert (neggert)
Jeff Ling (jeffling)
Jeremy Jordan (jeremyjordan)
Tullie Murrell (tullie)
Adrian Wälchli (awaelchli)
Nicki Skafte (skaftenicki)
Peter Yu (yukw777)
Rohit Gupta (rohitgr7)
Lezwon Castelino (lezwon)
Jeff Yang (ydcjeff)
Roger Shieh (s-rog)
Carlos Mocholí (carmocca)
Ananth Subramaniam (ananthsub)
Changelog¶
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[1.1.7] - 2021-02-03¶
[1.1.7] - Fixed¶
Fixed
TensorBoardLoggernot closingSummaryWriteronfinalize(#5696)Fixed filtering of pytorch “unsqueeze” warning when using DP (#5622)
Fixed
num_classesargument in F1 metric (#5663)Fixed
log_dirproperty (#5537)Fixed a race condition in
ModelCheckpointwhen checking if a checkpoint file exists (#5144)Remove unnecessary intermediate layers in Dockerfiles (#5697)
Fixed auto learning rate ordering (#5638)
[1.1.6] - 2021-01-26¶
[1.1.6] - Changed¶
[1.1.6] - Fixed¶
Fixed
toggle_optimizerto resetrequires_gradstate (#5574)Fixed FileNotFoundError for best checkpoint when using DDP with Hydra (#5629)
Fixed an error when logging a progress bar metric with a reserved name (#5620)
Fixed
Metric’sstate_dictnot included when child modules (#5614)Fixed Neptune logger creating multiple experiments when GPUs > 1 (#3256)
Fixed duplicate logs appearing in console when using the python logging module (#5509)
Fixed tensor printing in
trainer.test()(#5138)Fixed not using dataloader when
hparamspresent (#4559)
[1.1.5] - 2021-01-19¶
[1.1.4] - 2021-01-12¶
[1.1.4] - Fixed¶
Fixed
transfer_batch_to_devicefor DDP withlen(devices_ids) == 1(#5195)Logging only on
not should_accumulate()during training (#5417)Resolve interpolation bug with Hydra (#5406)
Check environ before selecting a seed to prevent warning message (#4743)
Fixed signature mismatch in
model_to_deviceofDDPCPUHPCAccelerator(#5505)
[1.1.3] - 2021-01-05¶
[1.1.3] - Added¶
[1.1.3] - Changed¶
[1.1.3] - Fixed¶
Fixed
trainer.testreturning non-test metrics (#5214)Fixed metric state reset (#5273)
Fixed
--num-nodesonDDPSequentialPlugin(#5327)Fixed invalid value for
weights_summary(#5296)Fixed
Trainer.testnot using the latestbest_model_path(#5161)Fixed existence check for hparams not using underlying filesystem (#5250)
Fixed
LightningOptimizerAMP bug (#5191)Fixed casted key to string in
_flatten_dict(#5354)
[1.1.2] - 2020-12-23¶
[1.1.2] - Added¶
[1.1.2] - Fixed¶
Metric reduction with Logging (#5150)
Remove nan loss in manual optimization (#5121)
Un-balanced logging properly supported (#5119)
Fix hanging in DDP HPC accelerators (#5157)
Fix saved filename in
ModelCheckpointif it already exists (#4861)Fix reset
TensorRunningAccum(#5106)Updated
DALIClassificationLoaderto not use deprecated arguments (#4925)Corrected call to
torch.no_grad(#5124)
[1.1.1] - 2020-12-15¶
[1.1.1] - Added¶
Add a notebook example to reach a quick baseline of ~94% accuracy on CIFAR10 using Resnet in Lightning (#4818)
[1.1.1] - Changed¶
[1.1.1] - Removed¶
[1.1.1] - Fixed¶
Fixed trainer by default
NoneinDDPAccelerator(#4915)Fixed
LightningOptimizerto expose optimizer attributes (#5095)Do not warn when the
namekey is used in thelr_schedulerdict (#5057)Check if optimizer supports closure (#4981)
Extend LightningOptimizer to exposure underlying Optimizer attributes + update doc (#5095)
Add deprecated metric utility functions back to functional ( #5067, #5068)
Allow any input in
to_onnxandto_torchscript(#4378)Do not warn when the name key is used in the
lr_schedulerdict (#5057)Fixed
DDPHPCAcceleratorhangs in DDP construction by callinginit_device(#5157)
[1.1.0] - 2020-12-09¶
[1.1.0] - Added¶
Added “monitor” key to saved
ModelCheckpoints(#4383)Added
ConfusionMatrixclass interface (#4348)Added multiclass AUROC metric (#4236)
Added global step indexing to the checkpoint name for a better sub-epoch checkpointing experience (#3807)
Added optimizer hooks in callbacks (#4379)
Added option to log momentum (#4384)
Added
current_scoretoModelCheckpoint.on_save_checkpoint(#4721)Added logging using
self.login train and evaluation for epoch end hooks ( #4552, #4495, #4439, #4684, #4913)Added ability for DDP plugin to modify optimizer state saving (#4675)
Added casting to python types for numpy scalars when logging hparams (#4647)
Added
prefixargument in loggers (#4557)Added printing of total num of params, trainable and non-trainable params in ModelSummary (#4521)
Added
PrecisionRecallCurve, ROC, AveragePrecisionclass metric (#4549)Added custom
ApexandNativeAMPasPrecision plugins(#4355)Added
DALI MNISTexample (#3721)Added
sharded pluginfor DDP for multi-gpu training memory optimizations ( #4639, #4686, #4675, #4737, #4773)Added
experiment_idto the NeptuneLogger (#3462)Added
Pytorch Geometricintegration example with Lightning (#4568)Added
all_gathermethod toLightningModulewhich allows gradient based tensor synchronizations for use-cases such as negative sampling. (#5012)Enabled
self.login most functions (#4969)Added changeable extension variable for
ModelCheckpoint(#4977)
[1.1.0] - Changed¶
Tuner algorithms will be skipped if
fast_dev_run=True(#3903)WandbLoggerdoes not force wandbreinitarg to True anymore and creates a run only when needed (#4648)Changed
automatic_optimizationto be a model attribute (#4602)Changed
Simple Profilerreport to order by percentage time spent + num calls (#4880)Simplify optimization Logic (#4984)
Classification metrics overhaul (#4837)
Updated
fast_dev_runto accept integer representing num_batches (#4629)Refactored optimizer (#4658)
[1.1.0] - Deprecated¶
[1.1.0] - Removed¶
[1.1.0] - Fixed¶
Added feature to move tensors to CPU before saving (#4309)
Fixed
LoggerConnectorto have logged metrics on root device in DP (#4138)Auto convert tensors to contiguous format when
gather_all(#4907)Fixed
PYTHONPATHfor ddp test model (#4528)Fixed allowing logger to support indexing (#4595)
Fixed DDP and manual_optimization (#4976)
[1.0.8] - 2020-11-24¶
[1.0.8] - Added¶
[1.0.8] - Changed¶
Consistently use
step=trainer.global_stepinLearningRateMonitorindependently oflogging_interval(#4376)Metric states are no longer as default added to
state_dict(#4685)Renamed class metric
Fbeta>>FBeta(#4656)Model summary: add 1 decimal place (#4745)
Do not override
PYTHONWARNINGS(#4700)Changed
init_ddp_connectionmoved fromDDPtoDDPPlugin(#4407)
[1.0.8] - Fixed¶
Fixed checkpoint
hparamsdict casting whenomegaconfis available (#4770)Fixed incomplete progress bars when total batches not divisible by refresh rate (#4577)
Updated SSIM metric (#4566)(#4656)
Fixed batch_arg_name - add
batch_arg_nameto all calls to_adjust_batch_sizebug (#4812)Fixed
torchtextdata to GPU (#4785)Fixed a crash bug in MLFlow logger (#4716)
[1.0.7] - 2020-11-17¶
[1.0.7] - Changed¶
[1.0.7] - Fixed¶
Prevent crash if
sync_dist=Trueon CPU (#4626)Fixed average pbar Metrics (#4534)
Fixed
setupcallback hook to correctly pass the LightningModule through (#4608)Allowing decorate model init with saving
hparamsinside (#4662)Fixed
split_idxset byLoggerConnectorinon_trainer_inittoTrainer(#4697)
[1.0.6] - 2020-11-11¶
[1.0.6] - Added¶
Added metrics aggregation in Horovod and fixed early stopping (#3775)
Added
manual_optimizer_stepwhich work withAMP Nativeandaccumulated_grad_batches(#4485)Added
persistent(mode)method to metrics, to enable and disable metric states being added tostate_dict(#4482)Added congratulations at the end of our notebooks (#4555)
Added parameters
move_metrics_to_cpuin Trainer to disable gpu leak (#4592)
[1.0.6] - Changed¶
[1.0.6] - Fixed¶
Fixed feature-lack in
hpc_load(#4526)Fixed metrics states being overridden in DDP mode (#4482)
Fixed
lightning_getattr,lightning_hasattrnot finding the correct attributes in datamodule (#4347)Fixed automatic optimization AMP by
manual_optimization_step(#4485)Replace
MisconfigurationExceptionwith warning inModelCheckpointCallback (#4560)Fixed logged keys in mlflow logger (#4412)
Fixed
is_picklableby catchingAttributeError(#4508)Fixed multi test dataloaders dict
AttributeErrorerror (#4480)Fixed show progress bar only for
progress_rank 0onDDP_SLURM(#4437)
[1.0.5] - 2020-11-03¶
[1.0.5] - Added¶
[1.0.5] - Changed¶
W&B log in sync with
Trainerstep (#4405)Hook
on_after_backwardis called only whenoptimizer_stepis being called (#4439)Moved
track_and_norm_gradintotraining loopand called only whenoptimizer_stepis being called (#4439)Changed type checker with explicit cast of
ref_modelobject (#4457)Changed
distributed_backend->accelerator(#4429)
[1.0.5] - Deprecated¶
Deprecated passing
ModelCheckpointinstance tocheckpoint_callbackTrainer argument (#4336)
[1.0.5] - Fixed¶
Disable saving checkpoints if not trained (#4372)
Fixed error using
auto_select_gpus=Truewithgpus=-1(#4209)Disabled training when
limit_train_batches=0(#4371)Fixed that metrics do not store computational graph for all seen data (#4313)
Fixed AMP unscale for
on_after_backward(#4439)Fixed TorchScript export when module includes Metrics (#4428)
Fixed TorchScript trace method’s data to device and docstring (#4360)
Fixed CSV logger warning (#4419)
Fixed skip DDP parameter sync (#4301)
Fixed
WandbLogger_sanitize_callable function (#4422)Fixed
AMP Native_unscalegradient (#4441)
[1.0.4] - 2020-10-27¶
[1.0.4] - Added¶
Added
dirpathandfilenameparameter inModelCheckpoint(#4213)Added plugins docs and DDPPlugin to customize ddp across all accelerators (#4258)
Added
strictoption to the scheduler dictionary (#3586)Added
fsspecsupport for profilers (#4162)Added autogenerated helptext to
Trainer.add_argparse_args(#4344)Added support for string values in
Trainer’sprofilerparameter (#3656)Added support for string values in
Trainer’sprofilerparameter (#3656)Added
optimizer_closuretooptimizer.stepwhen supported (#4190)Added unification of regression metrics (#4166)
Added checkpoint load from Bytes (#4314)
[1.0.4] - Changed¶
[1.0.4] - Deprecated¶
[1.0.4] - Fixed¶
Fixed setting device ids in DDP (#4297)
Fixed synchronization of best model path in
ddp_accelerator(#4323)Fixed
WandbLoggernot uploading checkpoint artifacts at the end of training (#4341)Fixed
FBetacomputation (#4183)Fixed
accumulation across batcheshas completedbefore breaking training loop(#4278)Fixed
ModelCheckpointdon’t increase current_epoch and global_step when not training (#4291)Fixed
COMET_EXPERIMENT_KEYenvironment variable usage in comet logger (#4230)
[1.0.2] - 2020-10-15¶
[1.0.1] - 2020-10-14¶
[1.0.0] - 2020-10-13¶
[1.0.0] - Added¶
Added Explained Variance Metric + metric fix (#4013)
Added Metric <-> Lightning Module integration tests (#4008)
Added parsing OS env vars in
Trainer(#4022)Added classification metrics (#4043)
Updated explained variance metric (#4024)
Enabled plugins (#4041)
Enabled custom clusters (#4048)
Enabled passing in custom accelerators (#4050)
Added
LightningModule.toggle_optimizer(#4058)Added
LightningModule.manual_backward(#4063)Added
outputargument to*_epoch_endhooks (#3967)
[1.0.0] - Changed¶
[1.0.0] - Removed¶
Removed support for EvalResult and TrainResult (#3968)
Removed deprecated trainer flags:
overfit_pct,log_save_interval,row_log_interval(#3969)Removed deprecated early_stop_callback (#3982)
Removed deprecated model hooks (#3980)
Removed deprecated callbacks (#3979)
Removed
trainerargument inLightningModule.backward#4056)
[1.0.0] - Fixed¶
[0.10.0] - 2020-10-07¶
[0.10.0] - Added¶
Enable PyTorch 1.7 compatibility (#3541)
Added
LightningModule.to_torchscriptto support exporting asScriptModule(#3258)Added warning when dropping unpicklable
hparams(#2874)Added EMB similarity (#3349)
Added
ModelCheckpoint.to_yamlmethod (#3048)Allow
ModelCheckpointmonitor to beNone, meaning it will always save (#3630)Disabled optimizers setup during testing (#3059)
Added support for datamodules to save and load checkpoints when training (#3563)
Added support for datamodule in learning rate finder (#3425)
Added gradient clip test for native AMP (#3754)
Added dist lib to enable syncing anything across devices (#3762)
Added
broadcasttoTPUBackend(#3814)Added
XLADeviceUtilsclass to check XLA device type (#3274)
[0.10.0] - Changed¶
Refactored accelerator backends:
moved TPU
xxx_stepto backend (#3118)refactored DDP backend
forward(#3119)refactored GPU backend
__step(#3120)remove obscure forward call in eval + CPU backend
___step(#3123)reduced all simplified forward (#3126)
added hook base method (#3127)
refactor eval loop to use hooks - use
test_modefor if so we can split later (#3129)moved
___step_endhooks (#3130)training forward refactor (#3134)
training AMP scaling refactor (#3135)
eval step scaling factor (#3136)
add eval loop object to streamline eval loop (#3138)
refactored dataloader process hook (#3139)
refactored inner eval loop (#3141)
final inner eval loop hooks (#3154)
clean up hooks in
run_evaluation(#3156)clean up data reset (#3161)
expand eval loop out (#3165)
moved hooks around in eval loop (#3195)
remove
_evaluatefx (#3197)Trainer.fithook clean up (#3198)DDPs train hooks (#3203)
reduced accelerator selection (#3211)
group prepare data hook (#3212)
added data connector (#3285)
modular is_overridden (#3290)
adding
Trainer.tune()(#3293)move
run_pretrain_routine->setup_training(#3294)move train outside of setup training (#3297)
move
prepare_datato data connector (#3307)moved accelerator router (#3309)
train loop refactor - moving train loop to own object (#3310, #3312, #3313, #3314)
duplicate data interface definition up into DataHooks class (#3344)
inner train loop (#3359, #3361, #3362, #3363, #3365, #3366, #3367, #3368, #3369, #3370, #3371, #3372, #3373, #3374, #3375, #3376, #3385, #3388, #3397)
all logging related calls in a connector (#3395)
added model connector (#3407)
moved eval loop logging to loggers (#3408)
moved eval loop (#3412#3408)
move
lr_finder(#3434)move specific accelerator code (#3457)
group connectors (#3472)
apex plugin (#3502)
precision plugins (#3504)
Result - make monitor default to
checkpoint_onto simplify (#3571)reference to the Trainer on the
LightningDataModule(#3684)add
.logto lightning module (#3686, #3699, #3701, #3704, #3715)enable tracking original metric when step and epoch are both true (#3685)
deprecated results obj, added support for simpler comms (#3681)
move backends back to individual files (#3712)
fixes logging for eval steps (#3763)
decoupled DDP, DDP spawn (#3733, #3766, #3767, #3774, #3802, #3806)
remove weight loading hack for ddp_cpu (#3808)
separate
torchelasticfrom DDP (#3810)separate SLURM from DDP (#3809)
decoupled DDP2 (#3816)
bug fix with logging val epoch end + monitor (#3812)
callback system and init DDP (#3836)
epoch can now log independently (#3843)
test selecting the correct backend. temp backends while slurm and TorchElastic are decoupled (#3848)
fixed
init_slurm_connectioncausing hostname errors (#3856)moves init apex from LM to apex connector (#3923)
moves sync bn to each backend (#3925)
moves configure ddp to each backend (#3924)
Deprecation warning (#3844)
Changed
LearningRateLoggertoLearningRateMonitor(#3251)Used
fsspecinstead ofgfilefor all IO (#3320)Swaped
torch.loadforfsspecload in DDP spawn backend (#3787)Swaped
torch.loadforfsspecload in cloud_io loading (#3692)Added support for
to_disk()to use remote filepaths withfsspec(#3930)Updated model_checkpoint’s to_yaml to use
fsspecopen (#3801)Fixed
fsspecis inconsistant when doingfs.ls(#3805)
Refactor
GPUStatsMonitorto improve training speed (#3257)Changed IoU score behavior for classes absent in target and pred (#3098)
Changed IoU
remove_bgbool toignore_indexoptional int (#3098)Changed defaults of
save_top_kandsave_lasttoNonein ModelCheckpoint (#3680)row_log_intervalandlog_save_intervalare now based on training loop’sglobal_stepinstead of epoch-internal batch index (#3667)Silenced some warnings. verified ddp refactors (#3483)
Cleaning up stale logger tests (#3490)
Allow
ModelCheckpointmonitor to beNone(#3633)Enable
Nonemodel checkpoint default (#3669)Skipped
best_model_pathifcheckpoint_callbackisNone(#2962)Used
raise .. from ..to explicitly chain exceptions (#3750)Mocking loggers (#3596, #3617, #3851, #3859, #3884, #3853, #3910, #3889, #3926)
Write predictions in LightningModule instead of EvalResult #3882
[0.10.0] - Deprecated¶
Deprecated
TrainResultandEvalResult, useself.logandself.writefrom theLightningModuleto log metrics and write predictions.training_stepcan now only return a scalar (for the loss) or a dictionary with anything you want. (#3681)Deprecate
early_stop_callbackTrainer argument (#3845)Rename Trainer arguments
row_log_interval>>log_every_n_stepsandlog_save_interval>>flush_logs_every_n_steps(#3748)
[0.10.0] - Removed¶
Removed experimental Metric API (#3868, #3943, #3949, #3946), listed changes before final removal:
Added hooks to metric module interface (#2528)
Added error when AUROC metric is used for multiclass problems (#3350)
Fixed
ModelCheckpointwithsave_top_k=-1option not tracking the best models when a monitor metric is available (#3735)Fixed counter-intuitive error being thrown in
Accuracymetric for zero target tensor (#3764)Fixed aggregation of metrics (#3517)
Fixed Metric aggregation (#3321)
Fixed RMSLE metric (#3188)
Renamed
reductiontoclass_reductionin classification metrics (#3322)Changed
class_reductionsimilar to sklearn for classification metrics (#3322)Renaming of precision recall metric (#3308)
[0.10.0] - Fixed¶
Fixed
on_train_batch_starthook to end epoch early (#3700)Fixed
num_sanity_val_stepsis clipped tolimit_val_batches(#2917)Fixed ONNX model save on GPU (#3145)
Fixed
GpuUsageLoggerto work on different platforms (#3008)Fixed auto-scale batch size not dumping
auto_lr_findparameter (#3151)Fixed
batch_outputswith optimizer frequencies (#3229)Fixed setting batch size in
LightningModule.datamodulewhen usingauto_scale_batch_size(#3266)Fixed Horovod distributed backend compatibility with native AMP (#3404)
Fixed batch size auto scaling exceeding the size of the dataset (#3271)
Fixed getting
experiment_idfrom MLFlow only once instead of each training loop (#3394)Fixed
overfit_batcheswhich now correctly disables shuffling for the training loader. (#3501)Fixed gradient norm tracking for
row_log_interval > 1(#3489)Fixed
ModelCheckpointname formatting (3164)Fixed auto-scale batch size (#3151)
Fixed example implementation of AutoEncoder (#3190)
Fixed invalid paths when remote logging with TensorBoard (#3236)
Fixed change
t()totranspose()as XLA devices do not support.t()on 1-dim tensor (#3252)Fixed (weights only) checkpoints loading without PL (#3287)
Fixed
gather_all_tensorscross GPUs in DDP (#3319)Fixed CometML save dir (#3419)
Fixed forward key metrics (#3467)
Fixed normalize mode at confusion matrix (replace NaNs with zeros) (#3465)
Fixed global step increment in training loop when
training_epoch_endhook is used (#3673)Fixed dataloader shuffling not getting turned off with
overfit_batches > 0anddistributed_backend = "ddp"(#3534)Fixed determinism in
DDPSpawnBackendwhen usingseed_everythingin main process (#3335)Fixed
ModelCheckpointperiodto actually save everyperiodepochs (#3630)Fixed
val_progress_bartotal withnum_sanity_val_steps(#3751)Fixed Tuner dump: add
current_epochto dumped_params (#3261)Fixed
current_epochandglobal_stepproperties mismatch betweenTrainerandLightningModule(#3785)Fixed learning rate scheduler for optimizers with internal state (#3897)
Fixed
tbptt_reduce_fxwhen non-floating tensors are logged (#3796)Fixed model checkpoint frequency (#3852)
Fixed logging non-tensor scalar with result breaks subsequent epoch aggregation (#3855)
Fixed
TrainerEvaluationLoopMixinactivatesmodel.train()at the end (#3858)Fixed
overfit_batcheswhen using with multiple val/test_dataloaders (#3857)Fixed enables
training_stepto returnNone(#3862)Fixed init nan for checkpointing (#3863)
Fixed for
load_from_checkpoint(#2776)Fixes incorrect
batch_sizeswhen Dataloader returns a dict with multiple tensors (#3668)Fixed unexpected signature for
validation_step(#3947)
[0.9.0] - 2020-08-20¶
[0.9.0] - Added¶
Added basic
CSVLogger(#2721)Added SSIM metrics (#2671)
Added BLEU metrics (#2535)
Added support to export a model to ONNX format (#2596)
Added support for
Trainer(num_sanity_val_steps=-1)to check all validation data before training (#2246)Added struct. output:
Added class
LightningDataModule(#2668)Added support for PyTorch 1.6 (#2745)
Added call DataModule hooks implicitly in trainer (#2755)
Added support for Mean in DDP Sync (#2568)
Added remaining
sklearnmetrics:AveragePrecision,BalancedAccuracy,CohenKappaScore,DCG,Hamming,Hinge,Jaccard,MeanAbsoluteError,MeanSquaredError,MeanSquaredLogError,MedianAbsoluteError,R2Score,MeanPoissonDeviance,MeanGammaDeviance,MeanTweedieDeviance,ExplainedVariance(#2562)Added support for
limit_{mode}_batches (int)to work with infinite dataloader (IterableDataset) (#2840)Added support returning python scalars in DP (#1935)
Added support to Tensorboard logger for OmegaConf
hparams(#2846)Added tracking of basic states in
Trainer(#2541)Tracks all outputs including TBPTT and multiple optimizers (#2890)
Added GPU Usage Logger (#2932)
Added
strict=Falseforload_from_checkpoint(#2819)Added saving test predictions on multiple GPUs (#2926)
Auto log the computational graph for loggers that support this (#3003)
Added warning when changing monitor and using results obj (#3014)
Added a hook
transfer_batch_to_deviceto theLightningDataModule(#3038)
[0.9.0] - Changed¶
Truncated long version numbers in progress bar (#2594)
Enabling val/test loop disabling (#2692)
Refactored into
acceleratormodule:Using
.comet.configfile forCometLogger(#1913)Updated hooks arguments - breaking for
setupandteardown(#2850)Using
gfileto support remote directories (#2164)Moved optimizer creation after device placement for DDP backends (#2904)
Support
**DictConfigforhparamserialization (#2519)Removed callback metrics from test results obj (#2994)
Re-enabled naming metrics in ckpt name (#3060)
Changed progress bar epoch counting to start from 0 (#3061)
[0.9.0] - Deprecated¶
Deprecated Trainer attribute
ckpt_path, which will now be set byweights_save_path(#2681)
[0.9.0] - Removed¶
Removed deprecated: (#2760)
core decorator
data_loaderModule hook
on_sanity_check_startand loadingload_from_metricspackage
pytorch_lightning.loggingTrainer arguments:
show_progress_bar,num_tpu_cores,use_amp,print_nan_gradsLR Finder argument
num_accumulation_steps
[0.9.0] - Fixed¶
Fixed
accumulate_grad_batchesfor last batch (#2853)Fixed setup call while testing (#2624)
Fixed local rank zero casting (#2640)
Fixed single scalar return from training (#2587)
Fixed Horovod backend to scale LR schedlers with the optimizer (#2626)
Fixed
dtypeanddeviceproperties not getting updated in submodules (#2657)Fixed
fast_dev_runto run for all dataloaders (#2581)Fixed
save_dirin loggers getting ignored by default value ofweights_save_pathwhen user did not specifyweights_save_path(#2681)Fixed
weights_save_pathgetting ignored whenlogger=Falseis passed to Trainer (#2681)Fixed TPU multi-core and Float16 (#2632)
Fixed test metrics not being logged with
LoggerCollection(#2723)Fixed data transfer to device when using
torchtext.data.Fieldandinclude_lengths is True(#2689)Fixed shuffle argument for distributed sampler (#2789)
Fixed logging interval (#2694)
Fixed loss value in the progress bar is wrong when
accumulate_grad_batches > 1(#2738)Fixed correct CWD for ddp sub-processes when using Hydra (#2719)
Fixed selecting GPUs using
CUDA_VISIBLE_DEVICES(#2739, #2796)Fixed false
num_classeswarning in metrics (#2781)Fixed shell injection vulnerability in subprocess call (#2786)
Fixed LR finder and
hparamscompatibility (#2821)Fixed
ModelCheckpointnot saving the latest information whensave_last=True(#2881)Fixed ImageNet example: learning rate scheduler, number of workers and batch size when using DDP (#2889)
Fixed apex gradient clipping (#2829)
Fixed save apex scaler states (#2828)
Fixed a model loading issue with inheritance and variable positional arguments (#2911)
Fixed passing
non_blocking=Truewhen transferring a batch object that does not support it (#2910)Fixed checkpointing to remote file paths (#2925)
Fixed adding val step argument to metrics (#2986)
Fixed an issue that caused
Trainer.test()to stall in ddp mode (#2997)Fixed gathering of results with tensors of varying shape (#3020)
Fixed batch size auto-scaling feature to set the new value on the correct model attribute (#3043)
Fixed automatic batch scaling not working with half precision (#3045)
Fixed setting device to root gpu (#3042)
[0.8.5] - 2020-07-09¶
[0.8.5] - Added¶
[0.8.5] - Fixed¶
Flattening Wandb Hyperparameters (#2459)
Fixed using the same DDP python interpreter and actually running (#2482)
Fixed model summary input type conversion for models that have input dtype different from model parameters (#2510)
Made
TensorBoardLoggerandCometLoggerpickleable (#2518)Fixed a problem with
MLflowLoggercreating multiple run folders (#2502)Fixed global_step increment (#2455)
Fixed TPU hanging example (#2488)
Fixed
argparsedefault value bug (#2526)Fixed Dice and IoU to avoid NaN by adding small eps (#2545)
Fixed accumulate gradients schedule at epoch 0 (continued) (#2513)
Fixed Trainer
.fit()returning last not best weights in “ddp_spawn” (#2565)Fixed passing (do not pass) TPU weights back on test (#2566)
[0.8.2] - 2020-06-28¶
[0.8.2] - Changed¶
[0.8.2] - Fixed¶
Fixed parsing TPU arguments and TPU tests (#2094)
Fixed number batches in case of multiple dataloaders and
limit_{*}_batches(#1920, #2226)Fixed an issue with forward hooks not being removed after model summary (#2298)
Fix for
load_from_checkpoint()not working with absolute path on Windows (#2294)Fixed an issue how _has_len handles
NotImplementedErrore.g. raised bytorchtext.data.Iterator(#2293), (#2307)Fixed
average_precisionmetric (#2319)Fixed ROC metric for CUDA tensors (#2304)
Fixed
average_precisionmetric (#2319)Fixed lost compatibility with custom datatypes implementing
.to(#2335)Fixed loading model with kwargs (#2387)
Fixed sum(0) for
trainer.num_val_batches(#2268)Fixed checking if the parameters are a
DictConfigObject (#2216)Fixed SLURM weights saving (#2341)
Fixed swaps LR scheduler order (#2356)
Fixed adding tensorboard
hparamslogging test (#2342)Fixed use model ref for tear down (#2360)
Fixed logger crash on DDP (#2388)
Fixed several issues with early stopping and checkpoint callbacks (#1504, #2391)
Fixed loading past checkpoints from v0.7.x (#2405)
Fixed loading model without arguments (#2403)
Fixed Windows compatibility issue (#2358)
[0.8.1] - 2020-06-19¶
[0.8.0] - 2020-06-18¶
[0.8.0] - Added¶
Added
overfit_batches,limit_{val|test}_batchesflags (overfit now uses training set for all three) (#2213)Added metrics
Added type hints in
Trainer.fit()andTrainer.test()to reflect that also a list of dataloaders can be passed in (#1723)Allow dataloaders without sampler field present (#1907)
Added option
save_lastto save the model at the end of every epoch inModelCheckpoint(#1908)Early stopping checks
on_validation_end(#1458)Attribute
best_model_pathtoModelCheckpointfor storing and later retrieving the path to the best saved model file (#1799)Speed up single-core TPU training by loading data using
ParallelLoader(#2033)Added a model hook
transfer_batch_to_devicethat enables moving custom data structures to the target device (1756)Added black formatter for the code with code-checker on pull (1610)
Added back the slow spawn ddp implementation as
ddp_spawn(#2115)Added loading checkpoints from URLs (#1667)
Added a callback method
on_keyboard_interruptfor handling KeyboardInterrupt events during training (#2134)Added a decorator
auto_move_datathat moves data to the correct device when using the LightningModule for inference (#1905)Added
ckpt_pathoption toLightningModule.test(...)to load particular checkpoint (#2190)Added
setupandteardownhooks for model (#2229)
[0.8.0] - Changed¶
Allow user to select individual TPU core to train on (#1729)
Removed non-finite values from loss in
LRFinder(#1862)Allow passing model hyperparameters as complete kwarg list (#1896)
Renamed
ModelCheckpoint’s attributesbesttobest_model_scoreandkth_best_modeltokth_best_model_path(#1799)Re-Enable Logger’s
ImportErrors (#1938)Changed the default value of the Trainer argument
weights_summaryfromfulltotop(#2029)Raise an error when lightning replaces an existing sampler (#2020)
Enabled
prepare_datafrom correct processes - clarify local vs global rank (#2166)Remove explicit flush from tensorboard logger (#2126)
Changed epoch indexing from 1 instead of 0 (#2206)
[0.8.0] - Deprecated¶
Deprecated flags: (#2213)
overfit_pctin favour ofoverfit_batchesval_percent_checkin favour oflimit_val_batchestest_percent_checkin favour oflimit_test_batches
Deprecated
ModelCheckpoint’s attributesbestandkth_best_model(#1799)Dropped official support/testing for older PyTorch versions <1.3 (#1917)
Deprecated Trainer
proc_rankin favour ofglobal_rank(#2166, #2269)
[0.8.0] - Removed¶
Removed unintended Trainer argument
progress_bar_callback, the callback should be passed in byTrainer(callbacks=[...])instead (#1855)Removed obsolete
self._devicein Trainer (#1849)Removed deprecated API (#2073)
Packages:
pytorch_lightning.pt_overrides,pytorch_lightning.root_moduleModules:
pytorch_lightning.logging.comet_logger,pytorch_lightning.logging.mlflow_logger,pytorch_lightning.logging.test_tube_logger,pytorch_lightning.overrides.override_data_parallel,pytorch_lightning.core.model_saving,pytorch_lightning.core.root_moduleTrainer arguments:
add_row_log_interval,default_save_path,gradient_clip,nb_gpu_nodes,max_nb_epochs,min_nb_epochs,nb_sanity_val_stepsTrainer attributes:
nb_gpu_nodes,num_gpu_nodes,gradient_clip,max_nb_epochs,min_nb_epochs,nb_sanity_val_steps,default_save_path,tng_tqdm_dic
[0.8.0] - Fixed¶
Run graceful training teardown on interpreter exit (#1631)
Fixed user warning when apex was used together with learning rate schedulers (#1873)
Fixed multiple calls of
EarlyStoppingcallback (#1863)Fixed an issue with
Trainer.from_argparse_argswhen passing in unknown Trainer args (#1932)Fixed bug related to logger not being reset correctly for model after tuner algorithms (#1933)
Fixed root node resolution for SLURM cluster with dash in host name (#1954)
Fixed
LearningRateLoggerin multi-scheduler setting (#1944)Fixed test configuration check and testing (#1804)
Fixed an issue with Trainer constructor silently ignoring unknown/misspelled arguments (#1820)
Fixed
save_weights_onlyin ModelCheckpoint (#1780)Allow use of same
WandbLoggerinstance for multiple training loops (#2055)Fixed an issue with
_auto_collect_argumentscollecting local variables that are not constructor arguments and not working for signatures that have the instance not namedself(#2048)Fixed mistake in parameters’ grad norm tracking (#2012)
Fixed CPU and hanging GPU crash (#2118)
Fixed an issue with the model summary and
example_input_arraydepending on a specific ordering of the submodules in a LightningModule (#1773)Fixed Tpu logging (#2230)
[0.7.6] - 2020-05-16¶
[0.7.6] - Added¶
Added callback for logging learning rates (#1498)
Added transfer learning example (for a binary classification task in computer vision) (#1564)
Added type hints in
Trainer.fit()andTrainer.test()to reflect that also a list of dataloaders can be passed in (#1723).Added auto scaling of batch size (#1638)
The progress bar metrics now also get updated in
training_epoch_end(#1724)Enable
NeptuneLoggerto work withdistributed_backend=ddp(#1753)Added option to provide seed to random generators to ensure reproducibility (#1572)
Added override for hparams in
load_from_ckpt(#1797)Added support multi-node distributed execution under
torchelastic(#1811, #1818)Added dummy logger for internally disabling logging for some features (#1836)
[0.7.6] - Changed¶
Enable
non-blockingfor device transfers to GPU (#1843)Replace mata_tags.csv with hparams.yaml (#1271)
Reduction when
batch_size < num_gpus(#1609)Updated LightningTemplateModel to look more like Colab example (#1577)
Don’t convert
namedtupletotuplewhen transferring the batch to target device (#1589)Allow passing hparams as keyword argument to LightningModule when loading from checkpoint (#1639)
Args should come after the last positional argument (#1807)
Made ddp the default if no backend specified with multiple GPUs (#1789)
[0.7.6] - Fixed¶
Fixed broken link in PR template (#1675)
Fixed ModelCheckpoint not None checking filepath (#1654)
Trainer now calls
on_load_checkpoint()when resuming from a checkpoint (#1666)Fixed sampler logic for ddp with iterable dataset (#1734)
Fixed
_reset_eval_dataloader()for IterableDataset (#1560)Fixed Horovod distributed backend to set the
root_gpuproperty (#1669)Fixed wandb logger
global_stepaffects other loggers (#1492)Fixed disabling progress bar on non-zero ranks using Horovod backend (#1709)
Fixed bugs that prevent lr finder to be used together with early stopping and validation dataloaders (#1676)
Fixed a bug in Trainer that prepended the checkpoint path with
version_when it shouldn’t (#1748)Fixed lr key name in case of param groups in LearningRateLogger (#1719)
Fixed saving native AMP scaler state (introduced in #1561)
Fixed accumulation parameter and suggestion method for learning rate finder (#1801)
Fixed num processes wasn’t being set properly and auto sampler was ddp failing (#1819)
Fixed bugs in semantic segmentation example (#1824)
Fixed native amp + ddp (#1788)
Fixed
hparamlogging with metrics (#1647)
[0.7.4] - 2020-04-26¶
[0.7.4] - Added¶
Added flag
replace_sampler_ddpto manually disable sampler replacement in DDP (#1513)Added speed parity tests (max 1 sec difference per epoch)(#1482)
Added
auto_select_gpusflag to trainer that enables automatic selection of available GPUs on exclusive mode systems.Added learning rate finder (#1347)
Added support for ddp mode in clusters without SLURM (#1387)
Added
test_dataloadersparameter toTrainer.test()(#1434)Added
terminate_on_nanflag to trainer that performs a NaN check with each training iteration when set toTrue(#1475)Added speed parity tests (max 1 sec difference per epoch)(#1482)
Added
terminate_on_nanflag to trainer that performs a NaN check with each training iteration when set toTrue. (#1475)Added
ddp_cpubackend for testing ddp without GPUs (#1158)Added Horovod support as a distributed backend
Trainer(distributed_backend='horovod')(#1529)Added support for 8 core distributed training on Kaggle TPU’s (#1568)
[0.7.4] - Changed¶
Changed the default behaviour to no longer include a NaN check with each training iteration. (#1475)
Decoupled the progress bar from trainer` it is a callback now and can be customized or even be replaced entirely (#1450).
Changed lr schedule step interval behavior to update every backwards pass instead of every forwards pass (#1477)
Defines shared proc. rank, remove rank from instances (e.g. loggers) (#1408)
Updated semantic segmentation example with custom U-Net and logging (#1371)
Disabled val and test shuffling (#1600)
[0.7.4] - Fixed¶
Added the possibility to pass nested metrics dictionaries to loggers (#1582)
Fixed memory leak from opt return (#1528)
Fixed saving checkpoint before deleting old ones (#1453)
Fixed loggers - flushing last logged metrics even before continue, e.g.
trainer.test()results (#1459)Fixed optimizer configuration when
configure_optimizersreturns dict withoutlr_scheduler(#1443)Fixed
LightningModule- mixing hparams and arguments inLightningModule.__init__()crashes load_from_checkpoint() (#1505)Added a missing call to the
on_before_zero_gradmodel hook (#1493).Allow use of sweeps with
WandbLogger(#1512)Fixed a bug that caused the
callbacksTrainer argument to reference a global variable (#1534).Fixed a bug that set all boolean CLI arguments from
Trainer.add_argparse_argsalways to True (#1571)Fixed do not copy the batch when training on a single GPU (#1576, #1579)
Fixed soft checkpoint removing on DDP (#1408)
Fixed automatic parser bug (#1585)
Fixed bool conversion from string (#1606)
[0.7.3] - 2020-04-09¶
[0.7.2] - 2020-04-07¶
[0.7.2] - Added¶
Added same step loggers’ metrics aggregation (#1278)
Added parity test between a vanilla MNIST model and lightning model (#1284)
Added parity test between a vanilla RNN model and lightning model (#1351)
Added Reinforcement Learning - Deep Q-network (DQN) lightning example (#1232)
Added support for hierarchical
dict(#1152)Added
TrainsLoggerclass (#1122)Added type hints to
pytorch_lightning.core(#946)Added support for
IterableDatasetin validation and testing (#1104)Added support for non-primitive types in
hparamsforTensorboardLogger(#1130)Added a check that stops the training when loss or weights contain
NaNorinfvalues. (#1097)Added support for
IterableDatasetwhenval_check_interval=1.0(default), this will trigger validation at the end of each epoch. (#1283)Added
summarymethod to Profilers. (#1259)Added informative errors if user defined dataloader has zero length (#1280)
Added testing for python 3.8 (#915)
Added a
training_epoch_endmethod which is the mirror ofvalidation_epoch_end. (#1357)Added model configuration checking (#1199)
Added support for optimizer frequencies through
LightningModule.configure_optimizers()(#1269)Added option to run without an optimizer by returning
Nonefromconfigure_optimizers. (#1279)Added a warning when the number of data loader workers is small. (#1378)
[0.7.2] - Changed¶
Changed (renamed and refatored)
TensorRunningMean->TensorRunningAccum: running accumulations were generalized. (#1278)Changed
progress_bar_refresh_ratetrainer flag to disable progress bar when set to 0. (#1108)Enhanced
load_from_checkpointto also forward params to the model (#1307)Updated references to
self.forward()to instead use the__call__interface. (#1211)Changed default behaviour of
configure_optimizersto use no optimizer rather than Adam. (#1279)Allow to upload models on W&B (#1339)
On DP and DDP2 unsqueeze is automated now (#1319)
Did not always create a DataLoader during reinstantiation, but the same type as before (if subclass of DataLoader) (#1346)
Did not interfere with a default sampler (#1318)
Remove default Adam optimizer (#1317)
Give warnings for unimplemented required lightning methods (#1317)
Made
evaluatemethod private >>Trainer._evaluate(...). (#1260)Simplify the PL examples structure (shallower and more readable) (#1247)
Changed min max gpu memory to be on their own plots (#1358)
Remove
.itemwhich causes sync issues (#1254)Changed smoothing in TQDM to decrease variability of time remaining between training / eval (#1194)
Change default logger to dedicated one (#1064)
[0.7.2] - Deprecated¶
[0.7.2] - Removed¶
[0.7.2] - Fixed¶
Fixed
model_checkpointwhen saving all models (#1359)Trainer.add_argparse_argsclassmethod fixed. Now it adds a type for the arguments (#1147)Fixed bug related to type checking of
ReduceLROnPlateaulr schedulers(#1126)Fixed a bug to ensure lightning checkpoints to be backward compatible (#1132)
Fixed a bug that created an extra dataloader with active
reload_dataloaders_every_epoch(#1196)Fixed all warnings and errors in the docs build process (#1191)
Fixed an issue where
val_percent_check=0would not disable validation (#1251)Fixed average of incomplete
TensorRunningMean(#1309)Fixed
WandbLogger.watchwithwandb.init()(#1311)Fixed an issue with early stopping that would prevent it from monitoring training metrics when validation is disabled / not implemented (#1235).
Fixed a bug that would cause
trainer.test()to run on the validation set when overloadingvalidation_epoch_endandtest_end(#1353)Fixed
WandbLogger.watch- use of the watch method without importingwandb(#1311)Fixed
WandbLoggerto be used with ‘ddp’ - allow reinits in sub-processes (#1149, #1360)Made
training_epoch_endbehave likevalidation_epoch_end(#1357)Fixed
fast_dev_runrunning validation twice (#1365)Fixed pickle error from quick patch
__code__(#1352)Fixed checkpointing interval (#1272)
Fixed validation and training loops run the partial dataset (#1192)
Fixed running
on_validation_endonly on main process in DDP (#1125)Fixed
load_spawn_weightsonly in proc rank 0 (#1385)Fixes
use_ampissue (#1145)Fixes using deprecated
use_ampattribute (#1145)Fixed Tensorboard logger error: lightning_logs directory not exists in multi-node DDP on nodes with rank != 0 (#1377)
Fixed
Unimplemented backend XLAerror on TPU (#1387)
[0.7.0] - 2020-03-06¶
[0.7.0] - Added¶
Added automatic sampler setup. Depending on DDP or TPU, lightning configures the sampler correctly (user needs to do nothing) (#926)
Added
reload_dataloaders_every_epoch=Falseflag for trainer. Some users require reloading data every epoch (#926)Added
progress_bar_refresh_rate=50flag for trainer. Throttle refresh rate on notebooks (#926)Updated governance docs
Added a check to ensure that the metric used for early stopping exists before training commences (#542)
Added
optimizer_idxargument tobackwardhook (#733)Added
entityargument toWandbLoggerto be passed towandb.init(#783)Added a tool for profiling training runs (#782)
Improved flexibility for naming of TensorBoard logs, can now set
versionto astrto just save to that directory, and usename=''to prevent experiment-name directory (#804)Added option to specify
stepkey when logging metrics (#808)Added
train_dataloader,val_dataloaderandtest_dataloaderarguments toTrainer.fit(), for alternative data parsing (#759)Added Tensor Processing Unit (TPU) support (#868)
Split callbacks in multiple files (#849)
Added support for multiple loggers to be passed to
Traineras an iterable (e.g. list, tuple, etc.) (#903)Added support for step-based learning rate scheduling (#941)
Added support for logging
hparamsas dict (#1029)Checkpoint and early stopping now work without val. step (#1041)
Support graceful training cleanup after Keyboard Interrupt (#856, #1019)
Added type hints for function arguments (#912, )
Added TPU gradient clipping (#963)
Added max/min number of steps in
Trainer(#728)
[0.7.0] - Changed¶
Improved
NeptuneLoggerby addingclose_after_fitargument to allow logging after training(#908)Changed default TQDM to use
tqdm.autofor prettier outputs in IPython notebooks (#752)Changed
pytorch_lightning.loggingtopytorch_lightning.loggers(#767)Moved the default
tqdm_dictdefinition from Trainer toLightningModule, so it can be overridden by the user (#749)Moved functionality of
LightningModule.load_from_metricsintoLightningModule.load_from_checkpoint(#995)Changed Checkpoint path parameter from
filepathtodirpath(#1016)Freezed models
hparamsasNamespaceproperty (#1029)Dropped
loggingconfig in package init (#1015)Renames model steps (#1051)
training_end>>training_epoch_endvalidation_end>>validation_epoch_endtest_end>>test_epoch_end
Refactor dataloading, supports infinite dataloader (#955)
Create single file in
TensorBoardLogger(#777)
[0.7.0] - Deprecated¶
[0.7.0] - Removed¶
[0.7.0] - Fixed¶
Fixed a bug where early stopping
on_end_epochwould be called inconsistently whencheck_val_every_n_epoch == 0(#743)Fixed a bug where the model checkpointer didn’t write to the same directory as the logger (#771)
Fixed a bug where the
TensorBoardLoggerclass would create an additional empty log file during fitting (#777)Fixed a bug where
global_stepwas advanced incorrectly when usingaccumulate_grad_batches > 1(#832)Fixed a bug when calling
self.logger.experimentwith multiple loggers (#1009)Fixed a bug when calling
logger.append_tagson aNeptuneLoggerwith a single tag (#1009)Fixed sending back data from
.spawnby saving and loading the trained model in/out of the process (#1017Fixed port collision on DDP (#1010)
Fixed/tested pass overrides (#918)
Fixed comet logger to log after train (#892)
Remove deprecated args to learning rate step function (#890)
[0.6.0] - 2020-01-21¶
[0.6.0] - Added¶
Added support for resuming from a specific checkpoint via
resume_from_checkpointargument (#516)Added support for
ReduceLROnPlateauscheduler (#320)Added support for Apex mode
O2in conjunction with Data Parallel (#493)Added option (
save_top_k) to save the top k models in theModelCheckpointclass (#128)Added
on_train_startandon_train_endhooks toModelHooks(#598)Added
TensorBoardLogger(#607)Added support for weight summary of model with multiple inputs (#543)
Added
map_locationargument toload_from_metricsandload_from_checkpoint(#625)Added option to disable validation by setting
val_percent_check=0(#649)Added
NeptuneLoggerclass (#648)Added
WandbLoggerclass (#627)
[0.6.0] - Changed¶
Changed the default progress bar to print to stdout instead of stderr (#531)
Renamed
step_idxtostep,epoch_idxtoepoch,max_num_epochstomax_epochsandmin_num_epochstomin_epochs(#589)Renamed
total_batch_nbtototal_batches,nb_val_batchestonum_val_batches,nb_training_batchestonum_training_batches,max_nb_epochstomax_epochs,min_nb_epochstomin_epochs,nb_test_batchestonum_test_batches, andnb_val_batchestonum_val_batches(#567)Changed gradient logging to use parameter names instead of indexes (#660)
Changed the default logger to
TensorBoardLogger(#609)Changed the directory for tensorboard logging to be the same as model checkpointing (#706)
[0.6.0] - Deprecated¶
[0.6.0] - Removed¶
Removed the
save_best_onlyargument fromModelCheckpoint, usesave_top_k=1instead (#128)
[0.6.0] - Fixed¶
Fixed a bug which ocurred when using Adagrad with cuda (#554)
Fixed a bug where training would be on the GPU despite setting
gpus=0orgpus=[](#561)Fixed an error with
print_nan_gradientswhen some parameters do not require gradient (#579)Fixed a bug where the progress bar would show an incorrect number of total steps during the validation sanity check when using multiple validation data loaders (#597)
Fixed support for PyTorch 1.1.0 (#552)
Fixed an issue with early stopping when using a
val_check_interval < 1.0inTrainer(#492)Fixed bugs relating to the
CometLoggerobject that would cause it to not work properly (#481)Fixed a bug that would occur when returning
-1fromon_batch_startfollowing an early exit or when the batch wasNone(#509)Fixed a potential race condition with several processes trying to create checkpoint directories (#530)
Fixed a bug where batch ‘segments’ would remain on the GPU when using
truncated_bptt > 1(#532)Fixed a bug when using
IterableDataset(#547)Fixed a bug where
.itemwas called on non-tensor objects (#602)Fixed a bug where
Trainer.trainwould crash on an uninitialized variable if the trainer was run after resuming from a checkpoint that was already atmax_epochs(#608)Fixed a bug where early stopping would begin two epochs early (#617)
Fixed a bug where
num_training_batchesandnum_test_batcheswould sometimes be rounded down to zero (#649)Fixed a bug where an additional batch would be processed when manually setting
num_training_batches(#653)Fixed a bug when batches did not have a
.copymethod (#701)Fixed a bug when using
log_gpu_memory=Truein Python 3.6 (#715)Fixed a bug where checkpoint writing could exit before completion, giving incomplete checkpoints (#689)
Fixed a bug where
on_train_endwas not called when ealy stopping (#723)
[0.5.3] - 2019-11-06¶
[0.5.3] - Added¶
Added option to disable default logger, checkpointer, and early stopping by passing
logger=False,checkpoint_callback=Falseandearly_stop_callback=FalserespectivelyAdded
CometLoggerfor use with Comet.mlAdded
val_check_intervalargument toTrainerallowing validition to be performed at every given number of batchesAdded functionality to save and load hyperparameters using the standard checkpoint mechanism
Added call to
torch.cuda.empty_cachebefore training startsAdded option for user to override the call t
backwardAdded support for truncated backprop through time via the
truncated_bptt_stepsargument inTrainerAdded option to operate on all outputs from
training_stepin DDP2Added a hook for modifying DDP init
Added a hook for modifying Apex
[0.5.3] - Changed¶
Changed experiment version to be padded with zeros (e.g.
/dir/version_9becomes/dir/version_0009)Changed callback metrics to include any metrics given in logs or progress bar
Changed the default for
save_best_onlyinModelCheckpointtoTrueAdded
tng_data_loaderfor backwards compatibilityRenamed
MLFlowLogger.clienttoMLFlowLogger.experimentfor consistencyMoved
global_stepincrement to happen after the batch has been processedChanged weights restore to first attempt HPC weights before restoring normally, preventing both weights being restored and running out of memory
Changed progress bar functionality to add multiple progress bars for train/val/test
Changed calls to
printto uselogginginstead
[0.5.3] - Deprecated¶
Deprecated
tng_dataloader
[0.5.3] - Fixed¶
Fixed an issue where the number of batches was off by one during training
Fixed a bug that occured when setting a ckeckpoint callback and
early_stop_callback=FalseFixed an error when importing CometLogger
Fixed a bug where the
gpusargument had some unexpected behaviourFixed a bug where the computed total number of batches was sometimes incorrect
Fixed a bug where the progress bar would sometimes not show the total number of batches in test mode
Fixed a bug when using the
log_gpu_memory='min_max'option inTrainerFixed a bug where checkpointing would sometimes erase the current directory
[0.5.2] - 2019-10-10¶
[0.5.2] - Added¶
Added
weights_summaryargument toTrainerto be set tofull(full summary),top(just top level modules) or otherAdded
tagsargument toMLFlowLogger
[0.5.2] - Changed¶
Changed default for
amp_leveltoO1
[0.5.2] - Removed¶
Removed the
print_weights_summaryargument fromTrainer
[0.5.2] - Fixed¶
Fixed a bug where logs were not written properly
Fixed a bug where
logger.finalizewasn’t called after training is completeFixed callback metric errors in DDP
Fixed a bug where
TestTubeLoggerdidn’t log to the correct directory
[0.5.1] - 2019-10-05¶
[0.5.1] - Added¶
Added the
LightningLoggerBaseclass for experiment loggersAdded
MLFlowLoggerfor logging withmlflowAdded
TestTubeLoggerfor logging withtest_tubeAdded a different implementation of DDP (
distributed_backed='ddp2') where every node has one model using all GPUsAdded support for optimisers which require a closure (e.g. LBFGS)
Added automatic
MASTER_PORTdefualt for DDP when not set manuallyAdded new GPU memory logging options
'min_max'(log only the min/max utilization) and'all'(log all the GPU memory)
[0.5.1] - Changed¶
Changed schedulers to always be called with the current epoch
Changed
test_tubeto an optional dependencyChanged data loaders to internally use a getter instead of a python property
Disabled auto GPU loading when restoring weights to prevent out of memory errors
Changed logging, early stopping and checkpointing to occur by default
[0.5.1] - Fixed¶
Fixed a bug with samplers that do not specify
set_epochFixed a bug when using the
MLFlowLoggerwith unsupported data types, this will now raise a warningFixed a bug where gradient norms were alwasy zero using
track_grad_normFixed a bug which causes a crash when logging memory
[0.5.0] - 2019-09-26¶
[0.5.0] - Changed¶
Changed
data_batchargument tobatchthroughoutChanged
batch_iargument tobatch_idxthroughoutChanged
tng_dataloadermethod totrain_dataloaderChanged
on_tng_metricsmethod toon_training_metricsChanged
gradient_clipargument togradient_clip_valChanged
add_log_row_intervaltorow_log_interval
[0.5.0] - Fixed¶
Fixed a bug with tensorboard logging in multi-gpu setup
[0.4.9] - 2019-09-16¶
[0.4.9] - Added¶
Added the flag
log_gpu_memorytoTrainerto deactivate logging of GPU memory utilizationAdded SLURM resubmit functionality (port from test-tube)
Added optional weight_save_path to trainer to remove the need for a checkpoint_callback when using cluster training
Added option to use single gpu per node with
DistributedDataParallel
[0.4.9] - Changed¶
Changed functionality of
validation_endandtest_endwith multiple dataloaders to be given all of the dataloaders at once rather than in seperate callsChanged print_nan_grads to only print the parameter value and gradients when they contain NaN
Changed gpu API to take integers as well (e.g.
gpus=2instead ofgpus=[0, 1])All models now loaded on to CPU to avoid device and out of memory issues in PyTorch
[0.4.9] - Fixed¶
Fixed a bug where data types that implement
.tobut not.cudawould not be properly moved onto the GPUFixed a bug where data would not be re-shuffled every epoch when using a
DistributedSampler
[0.4.8] - 2019-08-31¶
[0.4.8] - Added¶
Added
test_stepandtest_endmethods, used whenTrainer.testis calledAdded
GradientAccumulationSchedulercallback which can be used to schedule changes to the number of accumulation batchesAdded option to skip the validation sanity check by setting
nb_sanity_val_steps = 0
[0.4.8] - Fixed¶
Fixed a bug when setting
nb_sanity_val_steps = 0
[0.4.7] - 2019-08-24¶
[0.4.7] - Changed¶
Changed the default
val_check_intervalto1.0Changed defaults for
nb_val_batches,nb_tng_batchesandnb_test_batchesto 0
[0.4.7] - Fixed¶
Fixed a bug where the full validation set as used despite setting
val_percent_checkFixed a bug where an
Exceptionwas thrown when using a data set containing a single batchFixed a bug where an
Exceptionwas thrown if noval_dataloaderwas givenFixed a bug where tuples were not properly transfered to the GPU
Fixed a bug where data of a non standard type was not properly handled by the trainer
Fixed a bug when loading data as a tuple
Fixed a bug where
AttributeErrorcould be suppressed by theTrainer
[0.4.6] - 2019-08-15¶
[0.4.6] - Added¶
Added support for data to be given as a
dictorlistwith a single gpuAdded support for
configure_optimizersto return a single optimizer, two list (optimizers and schedulers), or a single list
[0.4.6] - Fixed¶
Fixed a bug where returning just an optimizer list (i.e. without schedulers) from
configure_optimizerswould throw anException
[0.4.5] - 2019-08-13¶
[0.4.5] - Added¶
Added
optimizer_stepmethod that can be overridden to change the standard optimizer behaviour
[0.4.4] - 2019-08-12¶
[0.4.4] - Added¶
Added supoort for multiple validation dataloaders
Added support for latest test-tube logger (optimised for
torch==1.2.0)
[0.4.4] - Changed¶
validation_stepandval_dataloaderare now optionallr_scheduleris now activated after epoch
[0.4.4] - Fixed¶
Fixed a bug where a warning would show when using
lr_schedulerintorch>1.1.0Fixed a bug where an
Exceptionwould be thrown if usingtorch.DistributedDataParallelwithout using aDistributedSampler, this now throws aWarninginstead
[0.4.3] - 2019-08-10¶
[0.4.3] - Fixed¶
Fixed a bug where accumulate gradients would scale the loss incorrectly
[0.4.0] - 2019-08-08¶
[0.4.0] - Added¶
Added 16-bit support for a single GPU
Added support for training continuation (preserves epoch, global step etc.)
[0.4.0] - Changed¶
Changed
training_stepandvalidation_step, outputs will no longer be automatically reduced
[0.4.0] - Removed¶
Removed need for
Experimentobject inTrainer
[0.4.0] - Fixed¶
Fixed issues with reducing outputs from generative models (such as images and text)
[0.3.6] - 2019-07-25¶
[0.3.6] - Added¶
Added a decorator to do lazy data loading internally
[0.3.6] - Fixed¶
Fixed a bug where
Experimentobject was not process safe, potentially causing logs to be overwritten
